
這一節主要簡介當代物理海洋學研究常會用到的一些觀測儀器與裝備(當然主要是以海研一號為例),例如溫鹽深儀(CTD)、表水溫鹽儀(thermosalinograph)、聲學都卜勒流剖儀 ADCP(Acoustic Doppler Current Profiler)、下放式ADCP (Lowered ADCP,LADCP)、多頻道科學聲納(Scientific Echo Sounder)、附壓力計之倒置式迴聲儀 PIES (Pressure equipped Inverted Echo Sounder)、拖曳式CTD載具 SeaSoar、走航式CTD (Underway CTD,UCTD)、ARGO剖面觀測浮標(ARGO Profiling Float)、自走式水下載具(Autonomous Underwater Vehicle,AUV) Seaglider、船舶雷達(Marine Radar)、高頻雷達(HF Radar) CODAR等,另外也會介紹一些物理海洋學研究常用到的衛星遙測海面資料(如紅外,海面風場,海面高度等),以及從何處取得這些資料等相關資訊。
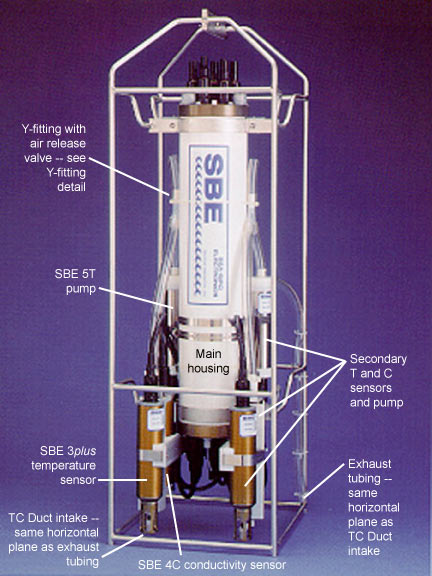
(1)溫鹽深儀(CTD):溫鹽深儀CTD (Conductivity-Temperature-Depth)是近代研究船必備的裝備,也可能是海研一號迄今卅多年來所有由船上下放作業的水下探測儀器中使用最頻繁的一項裝備。海研一號從1984年1月接船後由新加坡返國的第一個測試航次(是航次表記錄中編號0001航次之前的航次,並未編入正式航次)就開始使用Neil-Brown公司產製的CTD (Neil Brown Instrument Systems Mark III CTD)在南海進行水文調查作業(那時是使用Apple II微電腦記錄資料),Neil Brown CTD一直使用到1989年,為了執行世界海洋環流實驗WOCE (World Ocean Circulation Experiment, 1990-1997)計畫(由於WOCE要求鹽度量測精確度要達到0.001 psu)方才改用SeaBird公司產製之SBE 911 CTD,現在則為 SBE 911plus CTD。不管是使用哪種CTD,作業方式均大同小異,而一個完整的CTD作業系統則包括了CTD水下單元、吊放系統(A架或伸縮吊架等)、資料傳輸鋼纜(conductor wire cable)、具有電刷(slip ring)的絞纜機(winch)、以及CTD船上單元(deck unit,包括了電源供應、資料料解碼、資料輸出入等功能)和記錄電腦。海研一號目前所用的SBE 911plus CTD系統則是SBE 9plus水下單元(下圖左)以及SBE 11plus V2(下圖右)船上單元二者之合稱。
 |
|


 |
左圖為CTD系統執行量測作業之工作示意圖(摘自SBE 911plus CTD) SBE 9plus水下單元是靠SBE11plusV2船上單元經由資料傳輸鋼纜(只需單蕊導線即可,外層鋼纜可當地線)供電,二者間資料傳輸也是走同樣的導線(是以只需單蕊導線即可);而船上單元則另可接收GPS接收機給出的船位資訊以及外接光合有效輻射(PAR, Photosynthetically Active Radiation)感應器等資料,整合後再以序列(serial)或並列(parallel)方式傳給控制電腦,或轉送控制電腦下達的指令通知水下的輪盤式採水器依令工作。 |
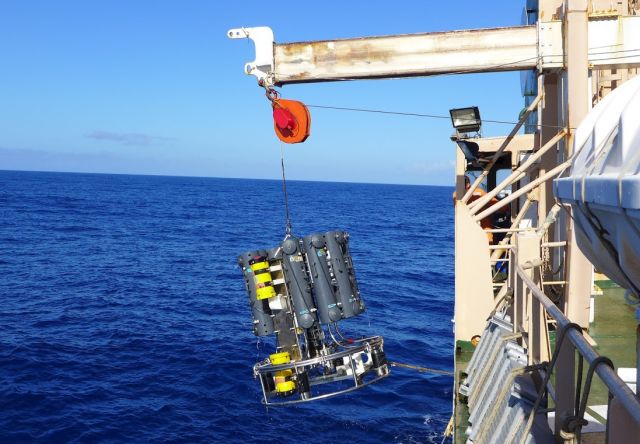 |
海研一號早期CTD吊放系統是使用A型吊架,但因吊架放下後與船舷邊之跨距僅1.5m左右,若風浪過大CTD上收作業常易導致採水瓶因擦撞船邊而破裂,後將吊放系統改為油壓伸縮吊臂(如左圖所示),並加大吊臂跨距,此後採水瓶破損率即大幅降低。左圖為海研一號在臺灣東部外海施放CTD作業照片,採水架上兩具鮮黃色物品為LADCP(下放式ADCP,說明見後)。(臺灣大學海洋研究所詹森教授提供) |
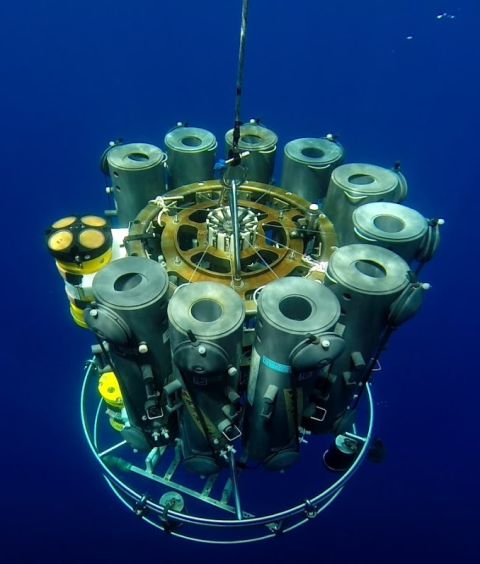 |
輪盤式採水器下水前,Go-flo採水瓶的球形閥是呈密閉狀態;下水後,由於壓力作用便將Go-flo採水瓶的球形閥蓋慢慢打開,隨後在CTD下放過程中瓶內海水即可與外界自由流通,直到操作人員由CTD船上單元發出「擊發」(firing)指令,輪盤式採水器接令後就會依照排定之順序打開一個卡筍,而卡筍一鬆則連接該卡筍之採水瓶連線(即圖中各瓶內側與中軸間的尼龍繩線)便會跳脫,連線跳脫後球形閥便自動關閉而完成該深度之水樣採集。(臺灣大學海洋研究所詹森教授提供) |
以海研一號為例,CTD絞機絞盤上的資料傳輸鋼纜全長為6000m,也就是有六公里長,而水下單元只能依賴鋼纜中央一根細細的導線從遠隔6公里距離外一端的CTD船上單元接收電力,同時也藉此線來傳輸資料,為減低電力傳輸損耗因此採用400伏特以上的高壓交流電送電,而資料則是採用載波頻率為34.56KHz的DPSK(Differential-Phase-Shift-Keyed)方式傳輸(5760 baud,每秒1 bit稱為1 baud),其原理和ADSL時代之前使用Modem數據機傳輸資料的方式類同(Neil-Brown CTD是採用FSK-Frequency Shift Keyed方式,也是類似方法),至於採水瓶控制信號則是使用300 baud的FSK方式傳輸,由於所用的DPSK與FSK頻率皆在音響範圍內,因此作業時也可以用錄音機同步記錄DPSK與FSK的音響信號,如有需要事後還可以將錄音重新播放給CTD船上單元,由後者再轉為數位資料傳輸給電腦儲存或顯示。
標準型SBE 9plus水下單元的最大作業深度為6800m,但如有特殊需求也可以選用最大作業深度為10,500m的加強型。SBE 11 plus的一些基本特性如下:使用SBE 3plus premium溫度探針、SBE 4C導電度探針、壓電晶體式壓力感應器、SBE 5T幫浦、資料傳輸(最多可再接另外八組其它感應器或探針)以及電源,Modem數據傳輸功能可以實時操控SBE 32 Carousel式輪盤採水器(Carousel Water Sampler)。至於SBE 11plus船上單元除了可將水下單元所測資料實時解碼傳給電腦外,亦可接受GPS的NMEA 0183格式資料輸入、可將PAR探針輸出以12-bit的A/D轉成數位資料、具有會發聲的觸底警報器、可將實時壓力信號輸號單獨輸出(例如可供操控水下拖體使用)等等功能(以上摘錄自SeaBird公司資料)。
由於使用頻繁,CTD鋼纜折損率較高;加以海上作業不免經常遭遇惡劣海況,此時CTD鋼纜在水中會因船體受浪橫搖而拉扯或是因鋼纜擦到船舷而導致導線或水下接頭容易受損,情況較輕的(例如造成有些接點接觸不良)只不過是資料傳輸過程中偶然錯誤率稍高,至於嚴重的狀況則往往造成鋼纜中導線斷裂甚或水下接頭拉扯破損進水,這些故障情形都仰賴作業技術人員及早發現予以檢修。海上臨時檢修作業通常是在CTD上收後藉助測量電阻或是使用TDR(稱為時域反射儀,Time Domain Reflectometer)來推估鋼纜導線斷裂點的大致位置,確定後先將斷裂點以下的鋼纜切斷再重新接線並做防水處理,這段過程往往要花費好幾小時才能修復;若是運氣不好,導線只是輕微破皮或仍是藕斷絲連,往往是CTD下水到某一深度後狀況會出現,但收回上船後測試卻又工作正常,這種情況最令人折騰,尤其是出此類狀況時多半天候不佳,在大搖大晃環境下維修工作甚是辛勞。另外要維持探測資料的良好品質,探針的例行校正也是很重要的工作;海研一號由於考量到所用探針數量並不多(但種類卻不少),如果花大經費投資在相關的校正設備上,不論從成本、使用量或是人力等方面看都不合經濟效益,因此目前仍是每年固定將各探針輪流送回原製造廠校正。
(2)表水溫鹽儀(thermosalinograph):研究船在航行期間可使用馬達抽取表層海水,再由管路將海水送至表水溫鹽儀測量(取樣間隔可自定,如海研一號所用之SBE 21 SeaCAT 表水溫鹽儀其最短取樣間隔為3秒,最長為10分鐘,通常多定為10秒或30秒),可以即時知道航線所經海域表層海水的溫度與鹽度,這些數據對於尋找或分析海面溫度鋒面或鹽度鋒面之位置很有幫助。
 |
左圖為裝置在海研一號上的表水溫鹽儀(SBE 21 SeaCAT Thermosalinograph)。圖左側四個水管口,由上而下分別為:排水管,淡水進水管(可接淡水沖洗用),海水進水管,以及清洗水排出口(後三者均接在連往量測筒的共同管路上,因此淡水與海水接口互換並無影響)。溫度與導電度探針(與SBE 9plus水下單元所使用的相同)則裝在右側的圓筒內,圓筒上方兩個電纜接頭分別為資料輸出與其它外接感應器(例如可在船底海水管進水口附近加裝溫度探針)之接口。(本圖摘自海洋一號貴重儀器中心網頁) |
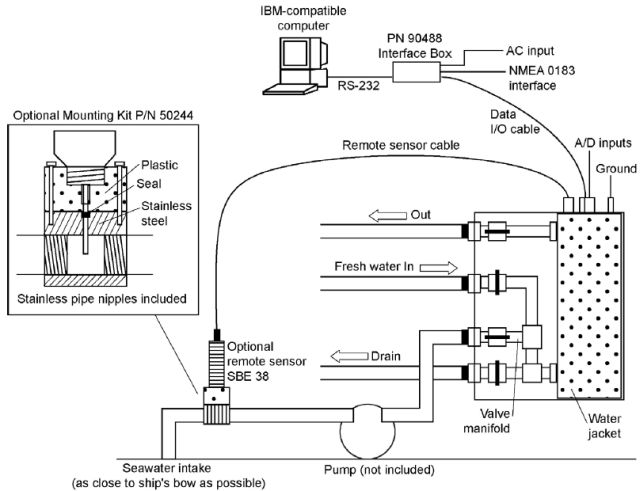 |
表水溫鹽儀管路以及線路系統配置示意圖(摘自SBE 21 Manual - Sea-Bird Scientific) |
(3)聲學都卜勒流剖儀,ADCP(Acoustic Doppler Current Profiler):
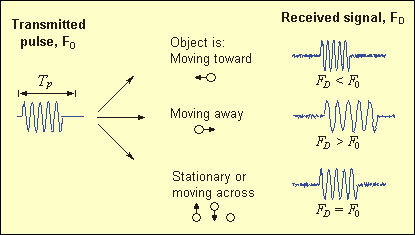 |
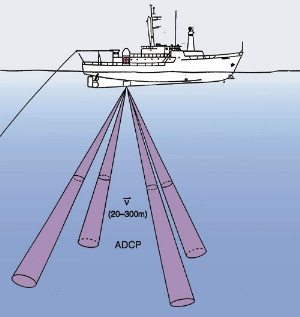
還記得本章第二節談過的「都卜勒效應」嗎?如果音鼓發出一組持續時間很短、類似脈衝(pulse)型態的聲波波列(如左圖,摘自Ocean Instruments, WHOI),此組聲波遇到正面而來的物體則回波的頻率會變高(物體與音鼓之距離可由音鼓發訊後到收到回波之歷時除以2後再乘以聲速得出),遇同向而行的物體則回波的頻率會變低,若物體與音鼓無相對運動或運動方向與聲波方向垂直則頻率不變。ADCP海流儀就是應用這種原理來量測海流。然而海水流速是三維的向量,以直角座標來表示就會有三個互相垂直的流速分量,因此至少要使用三組以上且互不平行的音鼓才得以量測出海流向量。下二圖分別為船載式ADCP海流量測作業示意圖(左)以及裝在海研一號船底的Sb-ADCP 音鼓(150 KHz,最大量測深度為400m,現更換為75KHz音鼓,最大量測深度可達700m)照片。 |
 摘自Hawaii Ocean Timeseries網頁 |
|

船載式ADCP作業時,從四個音鼓可以獲得沿著各音鼓所發四股音束上,不同深度距離各點回波之頻率偏移量(頻率增加表示該點海流為向著音鼓方向,頻率變小則為離開音鼓方向),根據頻率偏移量就可以算出流速分量,然而這些流速分量只是船與水體的相對速度,還不是海流真正的流速,必需要再根據船艏方向以決定相對速度在地理座標上的方向,然後扣除船速(航向、航行速率;由於風、浪以及流的影響,船隻航向與船艏向不一定會相同;另外船載式ADCP系統還有一項特別的循底模式-bottom tracking mode-功能,也就是ADCP系統會定時發出一組長聲波信號去量測海底與船的相對速度,由於海底並不動因此便可得出船速、船向),並經一些修正後才能得出海流流速。關於ADCP流速計算以及修正過程可參閱美國夏威夷大學Calculating Ocean velocity from ADCP data 網頁。
 |
|

 |
|

 |
 |
深海錨碇系統常用的長距型ADCP Teledyne RDI Workhorse Long Ranger ADCP主要規格為: |
 |
海研一號在臺灣東部黑潮流域回收臺大海洋所先前所布放之錨碇系統,此為其中長距型ADCP浮出海面之照片。(臺灣大學海洋研究所詹森教授提供) |
 |
特殊設計的ADCP除了測流外也可以用來同步量測波浪,左圖為放置在底碇固定架上的AWAC (Acoustic Wave and Currents)海流儀(挪威Nortek AS公司產品),係使用儀器正中的垂直音束量測水面之垂直距離(和前述聲學高度計測波同樣方式)得出波高,再利用外側三個傾斜音束所測流速之統計相關來計算波向(三柱音束在水中有位置差,是以波浪通過各音束的時間會不一樣,藉此可以估算波浪行進的方向)。(摘自Wikepedia Acoustic Doppler current profiler) |
(4)下放式ADCP (LADCP, Lowered ADCP):
 |
LADCP可以量測由海面至海底全水層內海流絕對流速的完整垂直剖面,其作法是將兩具ADCP(一上視,一下視)均裝在CTD系統上,並隨CTD水下單元一同下放便可同步觀測(CTD上方與下方各約100-200m水層內)水平海流流速的垂直剖面變化。雖然無法得知CTD水下單元在水中之運動速度,但這並不會影響到ADCP所量測到水平向海流之垂直流切(vertical shear);當CTD下放到接近海底約150m時,下層ADCP便會啟動「循底模式」而得到本身真正的運動速度,扣除後即得出海流的絕對流速,再一路往上啣接則可根據垂直流切值再算出從海面至海底整個水柱中各層海流的絕對水平流速。 左圖為海研一號LADCP作業照,上下兩具ADCP(頻率均為300 KHz)係以支架固定裝在輪盤式採水器上(共佔用兩個採水瓶位置)與CTD和Go-Flo採水瓶(下水前瓶蓋是關上的,到10m深後瓶蓋才會自動打開,這是為了避免海面萬一有油污會對採水瓶造成污染),這是整組系統正要下水進行海水溫、鹽以及流速剖面同步觀測時所照(臺灣大學海洋研究所詹森教授提供)。 |
(5)多頻道科學聲納(Scientific Echo Sounder):
聲、光、電、磁這四大物理現象中只有聲波可以在海水中傳播很遠的距離,其餘的不論是光波、雷達波、微波或是其它的電磁波在水中都衰減很快,因此很多海洋探測儀器都是使用聲學方法(例如前述的SOFAR float,走時式聲學流速計,ADCP等均是)。海洋界使用聲學方法的歷史很早,1912年4月15日鐵達尼號(RMS Titanic)在大西洋觸冰山沈沒導致超過1500人死亡事件造成當時舉世震驚,這場災變也觸發了聲學海洋學的發展;事發一個月後英國氣象學者Lewis Richardson便以「利用聲波之反射迴波來偵測水下障礙物」的構想向英國專利局提出了專利申請,而一年後德國物理學者Alexander Behm也提出並獲得了「迴聲測深機(echo sounder)」的專利,此後至1935年之前聲學探測主要是用於海洋測深以及尋找魚群。第二次世界大戰期間,基於反潛作戰所需,英、美、德等國海軍不約而同紛紛開發運用聲學方法以偵搜水下目標或是反偵搜的裝備,戰後將這類裝備統稱為「聲納」(SONAR,SOund Navigation And Ranging),相關技術也轉移至民間以及海洋科學研究使用(參見C. S. Clay and H. Medwin 1998: Fundamentals of Acoustical Oceanography, Academic, Boston以及Wikipedia SONAR)。
水下音鼓發出之窄波束音波如果遭遇到大型物體便會發生反射(迴聲測深機便是利用聲波發射時間與反射後迴聲返回時間之時間差來估算海底深度),但如果聲波遭遇到的是小型物體(例如海水中的懸浮物質、或是小型生物如浮游生物、仔稚魚等,甚或是聲速不連續處-例如水溫呈階梯狀的垂直變化處)則會發生散射(scattering),使用科學聲納除了可獲有迴聲資料外還可以量測、記錄船行途中船底音鼓下方每一層(例如每隔一公尺)水裡的散射信號強度(因為此散射信號之傳播方向是與發出音波方向呈180度反向,故又稱為後向散射backscattering),應用科學聲納的迴聲以及後向散射資料可以提供海洋內波研究、地形調查、海洋魚群及生物物種類識別及分布、漁業資源等方面許多重要的研究所需資訊。
海研一號目前使用的是Simrad EK60科學聲納(早期是使用Simrad EK500),其基本架構如下圖所示,是由兩組頻率分別為38 KHz以及120 KHz的傳感器音鼓(Transceiver),二組通用收發單元(GPT)、一個處理單元(Processor Unit)、一個乙太網路交換器(Ethernet switch)及一個顯示單元(Display screen)等所組成。
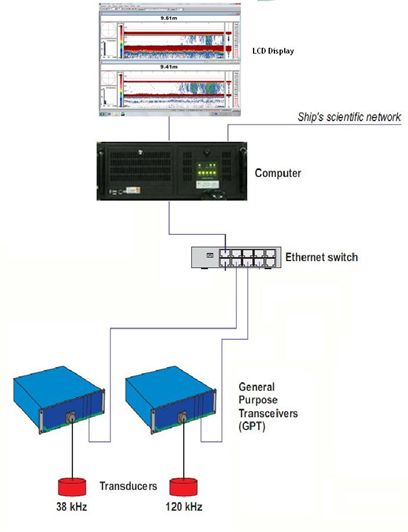 |
海研一號現用Simrad EK60多頻道科學聲納系統架構示意圖: |
海研一號Simrad EK60主要規格如下(摘自海洋一號貴重儀器中心網頁):
發射音鼓:
1.頻率(Frequency):38kHz、120kHz
2.波束寬度(beamwidth):7度
3.發射方式:均分波束(Split-beam)
4.功率:(38KHz)4KW、(120KHz)1KW
控制器主機:
1.頻率:38 KHZ、120KHZ
2.操作模式(operation
mode):Active,passive,Test
3測深範圍(data collection range):0-15000m
4傳輸功率(Transmission
power):Adjustable in steps
5.工作溫度(operating temperature):0-55°C
6.最大發Ping速度(Max ping rate):20ping/sec
7. 接收器的瞬時動態範圍(receiver instantaneous
dynamic range):150dB
8. 接收機噪聲係數(receiver noise figure):4dB
9. 均分波束(split beam):Complex digital demodulation
10.電力系統(power system):DC 10.5-14V/AC 110-230V
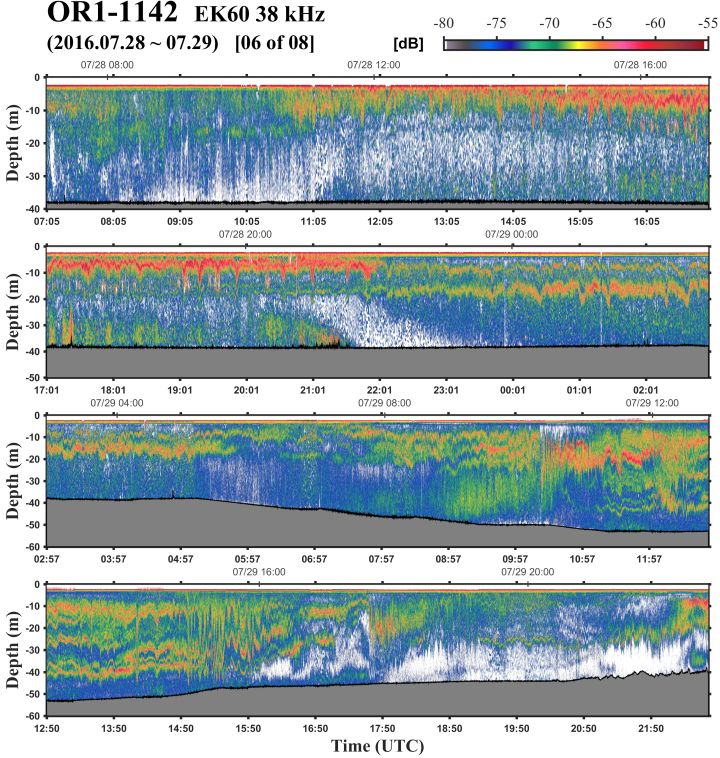
物理海洋學研究人員出海作業使用EK60除了量測水深外,更重要的是常用來觀察海面下的內波信號(另外並搭配使用航海雷達同步觀測,航海雷達見後述)。下圖為海研一號EK60量測資料之一例(科技部海洋學門資料庫郭天俠先生提供),該圖顯示橫軸時間自7/28 11:05起至7/28 22:01止,共約11小時期間內,海研一號所經航線下方海中出現許多類似下壓型內波(depression internal wave,關於內波請參閱本教材第七章)的訊號。
(6)附壓力計之倒置式迴聲儀 PIES (Pressure equipped Inverted Echo Sounder):
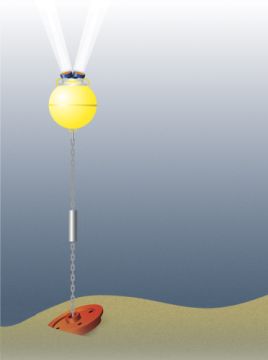
1969年美國羅德島大學(University of Rhode Island)的Tom Rossby教授提出以聲波走時來量測海洋斜溫層深度變化的構想,其原理為:海中聲速雖是溫度、鹽度與壓力的函數,但因在大洋中鹽度變化幅度不大,而壓力效應則在超過1000m深後才會顯著,然而深海中溫度與鹽度均相當平穩變化小,因此如果在海底放置一個每間隔固定時間便往海面發射一組脈衝聲波的聲納,便可量測得到聲波離開音鼓經海面反射後迴聲返回時間差(稱為雙程走時,round trip travel time)的時序資料(time series data),此資料中所呈現的走時變動便能反映斜溫層以上之海洋上層裡的溫度變化情形。將此構想轉化製成的聲學儀器便稱為倒置式聲納或倒置式迴聲儀(Inverted Echo Sounder, IES),並於1973年首次於Mid-Ocean Dynamics Experiment (MODE I)實驗中用以觀測斜溫層深度變化情形。1970年代後期,針對IES的一些使用缺點陸續做了許多改善,例如增加了使用壓電晶體式壓力感應器量測水壓(如此可以幫助確實推知海面至IES之垂直距離)、增加水溫、背景噪音等量測的選項、另外也將電子電路等元件小型化後並可以完全裝置在一個玻璃浮球內、還有改善耗電而使佈放時間可以達到一年半等等。加入壓力量測功能的IES便稱為PIES (Pressure equipped IES),如果將PIES再加上一具流速計以觀測底層海流則稱為CPIES (Current and Pressure equipped IES),[參閱Inverted Echo Sounder (IES/PIES/CPIES),GSO, Univ. of Rhode Island]。下圖右為臺大海洋所之PIES在海研一號後甲板準備下放作業時所照。(照片為臺灣大學海洋研究所詹森教授提供)
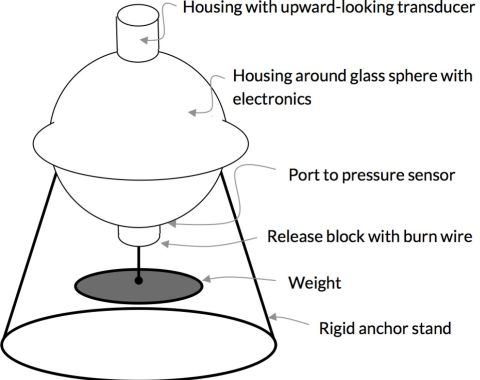 PIES各部示意圖(摘自WHOI Instruments Putting PIESs in a Greenland Fjord 網頁) |
|

 |
 |
| 臺大海洋所之PIES回收上浮於海面照片 | 海研一號右舷上收PIES作業照片 |
使用PIES可以間接量測出上層海洋整體溫度的變化情形,根據這些變化可以偵測大尺度的非線性內波(參閱第七章,以及Li, Q. et al. 2009: Acoustical Measurement of Nonlinear Internal Waves Using the Inverted Echo Sounder, J. Atm. and Ocean. Tech., 26, 2228-2242)以及推算大尺度海流流量或流況之變化(必需有陣列式的同步觀測)等,關於PIES資料的詳細分析細節可以參閱[蔡承儒,2015:利用倒置式迴聲儀估算海洋中尺度水文場的變動 ─ 應用於臺灣東部及呂宋東北方海域,臺灣大學海洋研究所碩士學位論文]。或許有人仍會提出疑問:本章前小節才說到物理海洋定點觀測實驗不是常用ADCP錨碇嗎?PIES又不能直接量出流速剖面為什麼還要用呢?這是「何不食肉糜」式的提問,與ADCP錨碇相比,PIES是相對成本低非常多的觀測儀器,物理海洋研究從來都不會嫌觀測儀器太多、更不會嫌觀測網太密,反倒是永遠都是經費不足、船期不夠,都是只能以手頭上所能掌控的有限資源去執行「雄心勃勃」的實驗,因此必需將經費與資源做最有效的運用,高成本的ADCP錨碇數量有限,只能佈放在少數關鍵地點,其它的地方就只有依賴船測或較低成本的儀器觀測來補足。
(7)拖曳式CTD載具 SeaSoar:
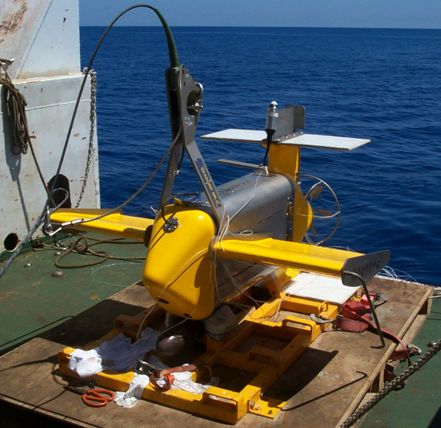
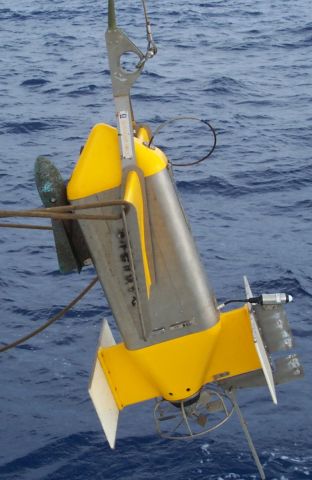
SeaSoar是一種可以按照船上操作者所發指令而調控雙翼以改變運動行為(爬升、下潛、或水平行進)的水下拖體。如果照英文字面翻譯,這種拖體應當稱為「海翔器」,然而其滑行原理其實類似風箏(如後),所以實應稱為「SeaKite」「海風箏」才對。不過由於我們使用SeaSoar都是將CTD裝在其機殼內,然後以電腦程式自動操控,令SeaSoar在水中不斷採取鋸齒狀的爬升(到接近海面)與下潛(可到400m深以上)動作(稱為undulating flight mode,起伏飛行模式),從而量測拖行路徑途中海水溫、鹽場的高解析(通常就是在不很長-約二至三公里-的水平距離內就可以得到一組垂直剖面觀測資料;當然這個水平距離會視放出去的纜長而定,如果在陸棚上作業鋼纜放出較短,每上下一次的水平距離可縮小至300-400m)垂直剖面分布,所以我們就將SeaSoar的中文名稱改為拖曳式CTD載具。這類型的載具也有很多不同的造型與設計,例如BatFish,ScanFish等均是(對此有興趣者可點選此二名稱,下載說明文件觀看)。下圖左為海研一號貴儀中心所有之SeaSoar下水作業前照片,下圖右為正要下水作業時照片,二圖均為2002年攝於海研一號。
 |
 |
 |
在SeaSoar背部機殼內安裝了一具SBE 9plus CTD水下單元,右上角的銀白色物體(未完全照出)則為水下PAR sensor的一部份。(2002年攝於海研一號) |
 |
SeaSoar在水中拖行時可藉助改變雙翼的攻角而變化行進姿態。SeaSoar前機腹下方炸彈型物品為配重,而其尾部有一組槳葉(如左圖下),拖行時槳葉會不停轉動,槳葉轉動經由連桿及齒輪再帶動裝在SeaSoar機體內的一個小型油壓幫浦,這就是機體內部油壓系統的動力來源。SeaSoar的雙翼變換角度便是靠此油壓系統來推動。操作人員在船上藉由改變電壓大小(經由拖纜內的導線傳至水下)來調整雙翼角度;水下機體內部裝有一個稱為Moog valve (據說與F16戰鬥機上所用的同型)可受電壓控制的油壓管路控制閥,可用來改變通過油壓管的出油速率以及液壓油的流動方向,藉此就能調整雙翼的角度。若將雙翼調成前高後低,拖行時水流的沖擊力便會促使機體向上爬升,若將雙翼調成前低後高則為下潛(所以說應當叫「海風箏」才對)。船上操控電腦可以設定為手控模式,或是自動起伏飛行模式,在後項模式下作業系統會視SeaSoar所載CTD傳回的現場深度、SeaSoar機腹下方高度計數值、船上測深儀所測深場水深、以及事先設定之最大量測水深等條件綜合研判,然後藉由數位/類比轉換器改變輸出的電壓信號值,水下拖體便會聽命按照所下指令在水中飛行。 |
 |
SeaSoar作業需要配合本身專用的絞機系統(如左圖,攝於海研一號)。 |
SeaSoar拖行作業時船速可高達8-10節,此時水下鋼纜在水中拖行的阻力就會變得很大,當阻力過大水下鋼纜便會上漂因此就會使SeaSoar下潛深度受到很大的影響,是以必需為水下鋼纜加裝導流片(fairing,如上圖絞盤最左方為未加裝導流片之鋼纜,其右側黃褐色者均為加裝了導流片)以減少阻力,也因為這個因素所以就得使用又大又重的絞盤才能盤上全長為800m的水下拖曳鋼纜(fairing不可壓疊,只能排一層);此外,臺灣近海漁作頻繁,拖行作業時常會纏上海中廢棄的延繩釣繩或漂流物而使導流片大片受損因而影響到SeaSoar效能(最大下潛深度變淺,有時則使機體傾斜),因此拖曳作業中途不免有時必需令SeaSoar上浮並上收部份拖曳鋼纜而在船上臨時維修,在海上更換、維護導流片工作甚為耗工耗時,非常辛苦。SeaSoar專用絞機系統又大又重,會佔據後甲板很大一部份作業空間,加以拖曳作業亦需甚多支援人力,因此一般研究人員如果本身沒有足夠的技術人力團隊支撐,而想要順利操作SeaSoar實在會是件有心無力的難事;自從更輕便的走航溫鹽深儀(underway CTD,UCTD)問世後,近年來需要高解析水平距離溫鹽剖面之走測作業幾乎都被UCTD所取代。下列二圖為SeaSoar觀測資料之實例,上圖為海研一號於2001年5月6日在南海北部以SeaSoar拖測作業所得出海水密度垂直剖面分布,下圖則為同時段之EK500科學聲納38 Khz音鼓聲學後向散射強度之垂直剖面分布,注意陸棚斷崖地形左側處,二圖均顯示出現強烈的內波信號,該航次作業時是將EK500設定為每1.5秒ping一次,故水平解析度很高(船速若以8節計,則約每走6公尺可以有一筆資料)得以完整呈現出許多短波長內波的波形構造,SeaSoar之起伏觀測雖無法達到這麼高的水平解析,但仍能量測到比較大尺度的內波波形。
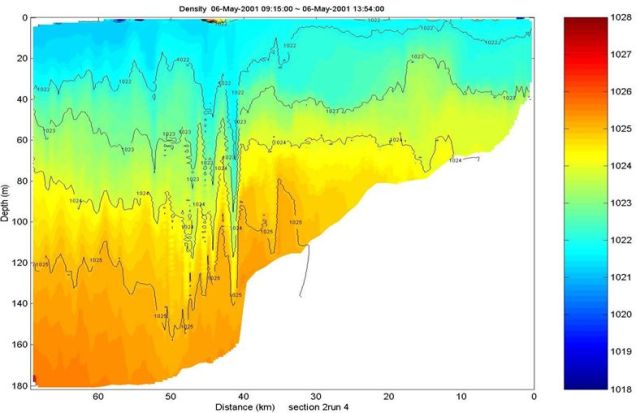 |
根據2001 05/06 0915-1354L 期間海研一號SeaSoar拖測所得資料繪出之海水密度垂直剖面分布圖。 |
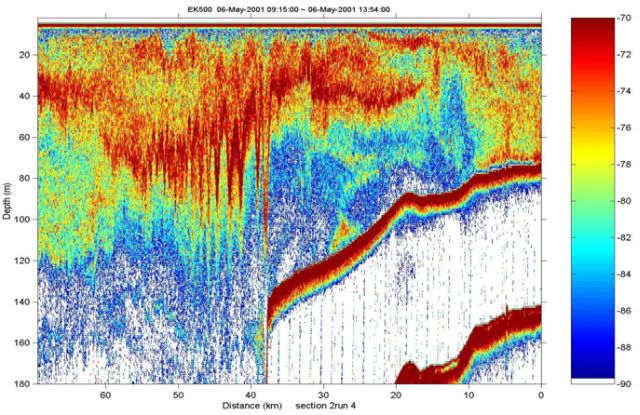 |
根據2001 05/06 0915-1354L 期間海研一號EK500科學聲納所測資料繪出之38 Khz音鼓聲學後向散射強度垂直剖面分布圖。 |
(8)走航溫鹽深儀 UCTD (Underway CTD):
我們在之前各節已經簡介了海洋調查上三種量測海水溫鹽垂直結構的方法,也就是(1)研究船停船後由吊放系統從船邊下放CTD進行觀測,可以加掛各式各樣的感應器,只要纜索夠長就可以一直下放到最深的海底,資料品質最好也最全面(作業同時還可以採集水樣以便做其它分析),但缺點是耗時久,人力與船期成本甚高,一天做不了幾個測站。(2)使用拖曳式載具(如SeaSoar),由於使用的是與船邊作業同型的CTD,是以資料品質不會亞於船邊作業,且可以用走測方式連續作業,因此可以得到水平解析度很高的剖面資料,但缺點在於拖曳作業需使用特定的絞機(後甲板如果空間不夠還無法安裝),同時需要專業技術人員操作。(3)使用可棄式BT(XBT)甚或XCTD,優點是可以走測,操作簡單,但缺點是資料品質較差(深度並非實測,而是按自由落體公式推估,不確定度較大),如果使用量很大那購置成本也會很高,同時因不可回收故對環境不友善,等於在海中拋棄了許多垃圾。從以上優缺點對比可看出,如果能將可棄式BT探頭改為可回收式,同時強化探頭上各感應器之功能(增加導電度以及壓力,同時要求精確度要高、取樣速率要快、資料內存空間要大、資料下載速度要快,單價成本要夠低)那麼就會非常符合海洋研究的需求而有利基,「走航溫鹽深儀」(underway CTD)便是Teledyne Oceanscience公司在這種思維引導下設計出來的(UnderwayCTDTM為Oceanscience的註冊商標)。不過「太陽底下沒有新鮮事」,坊間也有功能類似的其它產品(但是名稱不同,不過功能更強可以全自動化作業,當然價格也會更貴),例如Rolle-Royce集團下的ODIM Brooke Ocean公司便產製一種命名為Moving Vessel ProfilerTM(航行剖面儀)的裝備(全自動控制的收放絞機+水下拖魚型探頭),有興趣者可參閱該公司網頁(An Underway Ocean Profiling System)。
 |
UCTD水下探頭完整組裝後照片(摘自OCEANSCIENCE) |
 |
UCTD水下探頭可分解為頭尾兩部份,左圖上為尾部線軸,左圖下則為頭部(包括了溫、鹽、深探針以及電子電路部份)。(摘自OCEANSCIENCE) |
UCTD是位於美國加州Oceanside的Oceanscience Group公司組裝製造的產品,整組系統主要包括下列幾項元件:(1)探頭所用感測器為Sea-Bird CTD Probe 10-400,(2)探頭尾部之尾線軸(Tail Spool),(3)尾線軸之繞線器(Tail Spool Re-winder),(4)船釣用鼓式捲線器(Winch with level wind),(5)1400 m長可承受300磅拉力(材質為Spectra 2000)之Spectra纖維釣線(Spectra line),(6)UCTD收放用吊架與滑車(Davit and block),(7)安裝吊架用底座(Mounting pedestal)以及(8)電源供應器(Power supply)。UCTD探頭所用感測器之規格則如下表所示 (摘自OCEANSCIENCE):
| UCTD sensor specifications | C [S/m] | T [°C] | D [dbar] | S [psu] |
| Resolution | 0.0005 | 0.002 | 0.5 | 0.005 |
| Raw Data Accuracy | 0.03 | 0.01 to 0.02 | 4 | 0.3 |
| Processed Data Accuracy | 0.002 to 0.005 | 0.004 | 1 | 0.02 to 0.05 |
| Range | 0 to 9 | -5 to 43 | 0 to 2000 | 0 to 42 |
以下為海研一號航行途中進行UCTD觀測的作業照片,由左而右由上而下依序為:(1)UCTD從船尾擲下水後便會以自由落體方式向下潛,此照片顯示UCTD之鼓式捲線器以及向船尾後方拋射出去的Spectra纖維釣線;專用捲線器拋線速度已調至適當狀態(如拋線過慢會妨礙到探頭的自由落體速度,過快則有可能造成Spectra纖維釣線自己相纏);(2)到預定深度後作業人員開動鼓式捲線器捲線,將釣線與探頭均捲回上收上船,此照片為UCTD探頭正要收上船時所拍攝;(3)從另一個角度看UCTD探頭正要上收上船;(4)上收後將探頭頭尾解開,頭部可用藍芽與電腦連線後以電腦下載觀測資料,尾部線軸則可裝到繞線器上,將鼓式捲線器捲回之Spectra纖維釣線再繞回尾線軸,以備下一次施放作業用。(以下照片均為臺灣大學海洋研究所詹森教授提供)
 |
 |
 |
 |
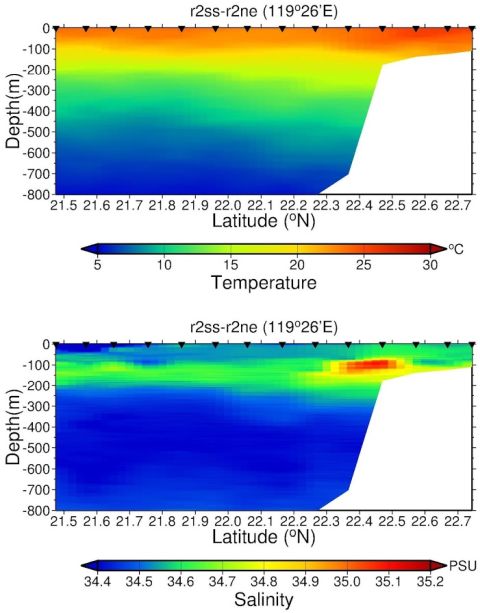 |
左圖為UCTD量測結果一例,係海研一號在台灣西南海域以UCTD所測之海水溫、鹽垂直剖面,圖上方之黑色倒三角形標誌為UCTD施放站位(約每0.1緯度一站)(臺灣大學海洋研究所詹森教授提供)。 |
(9)ARGO剖面觀測浮標(ARGO Profiling Float):
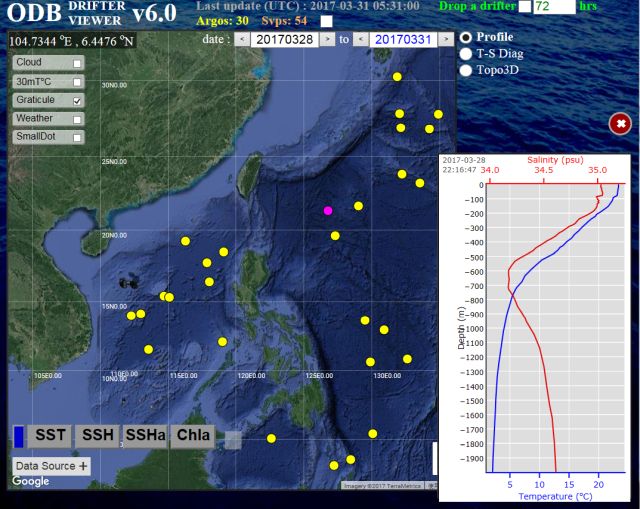
本章前節介紹了一些傳統式的浮標,不論SVP float或是SOFAR float都是隨某設定平面上(SVP float為接近海面,SOFAR float則在SOFAR通道的深度)的海水流動;隨著衛星科技的發展,新一代的浮標也進步到可以在漂流的同時量測海洋的溫、鹽垂直剖面,這種浮標稱為ARGO剖面觀測浮標,或簡稱為ARGO浮標,目前已發展成為國際合作的海洋觀測網,從2000年開始佈放算起,全球每年平均約新增800具,使得目前全球海洋中存活的ARGO浮標總數量已達3900具以上(如下圖),這些浮標持續不斷提供全球海面下溫、鹽垂直結構,並與衛星遙測(海面風場、波浪場、溫、鹽、海面高度等)共同組成全球海洋觀測系統中重要的一環。(摘自ARGO官網)
 |
ARGO剖面觀測浮標全球海洋中之分布情形。(摘自ARGO官網)
ARGO官網之logo。 |
依ARGO官網上的說明,這種浮標之所以稱為「ARGO」旨在於說明其與衛星高度計任務「JASON」之間有密切的關係(因為Jason是古希臘神話中的英雄人物,而Jason率眾出發尋找「金羊毛」所搭乘的船船名便叫「Argo」)。如上圖右下之ARGO官網logo圖樣中就是一艘古帆船。
ARGO浮標最早的前身是由Russ Davis(美國Scripps Institution od\f Oceanography, SIO)與Doug Webb (Webb Research Corporation)為世界海洋環流實驗WOCE計畫(1990-1997年)需要所開發出的Autonomous Lagrangian Circulation Explorer (ALACE)浮標,ALACE浮標剛開始時只是同來追蹤某一深度海水的流動(ALACE會定期浮上海面經由衛星定位以及傳送位置資料後再下潛至設定深度),但不久之後原設計者就認知到在ALACE上浮時也可以趁便量測溫鹽剖面,ALACE浮標加裝溫鹽感應器後便稱為PALACE float (Profiling ALACE float),當WOCE快結束時全球海洋中有將近1000具ALACE浮標,其中多數都是PALACE型浮標。1998年WOCE結束後,SIO的Dean Roemmich以及WHOI的Ray Schmitt分別提出兩份使用剖面觀測浮標進行全球海洋觀測的計畫書,其中前者所提計畫書名為「A Proposal for Global Ocean Observations for Climate: the Array for Real-time Geostrophic Oceanography (ARGO)」(為氣候研究之全球海洋觀測計畫建議書:地轉海洋學實時觀測陣列ARGO),而後者所提則為「A program for Global Ocean SAlinity MonitORing (GOSAMOR)」,這兩份計畫書所建議的全球漂流浮標剖面觀測均獲World Climate Research Programme (WCRP)項下CLIVAR (Climate and Ocean :Variability, Predictability and Change)計畫高度支持,隨後由Dean Roemmich主導的ARGO計畫便誕生了。(以上摘自ARGO官網)
ARGO浮標主要由三個單元所組成:(1)液壓系統:控制浮力用。在浮標底部外側裝有一個作用類似魚鰾的油囊,當液壓控制系統將浮標內部的油打入油囊(使浮標體積增大)後,浮標比重便比外圍海水輕,於是浮標即會上浮;到了海面後液壓控制系統再將油囊中的油抽回,於是浮標又會下潛。(2)微處理機系統:負責管控資料收集、傳送以及上升、下潛等功能以及排定時程。(3)資料傳送系統:負責管控與衛星通訊以及定位作業。下圖為ARGO浮標內部架構示意圖,每具ARGO浮標在空氣中約為20公斤重,最大作業深度為2000m,最大耐壓深度則為2600m。(摘自ARGO官網)
 |
 |
ARGO SOLO(左)以及SOLO II (右)浮標內部架構示意圖。(摘自ARGO官網) |
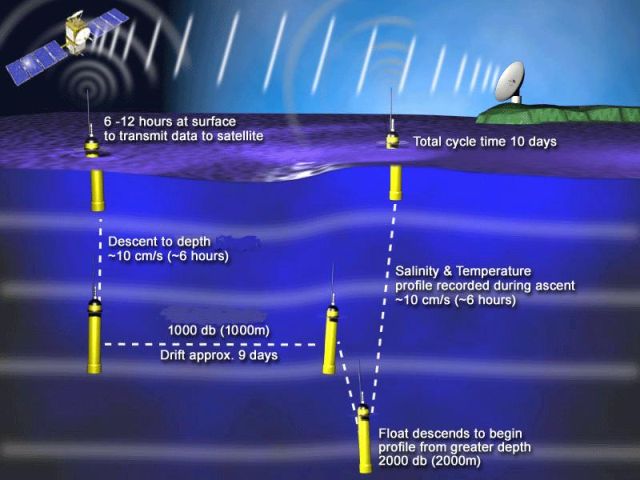 |
ARGO浮標觀測作業示意圖。(摘自ARGO官網) |
 |
ARGO實時資料處理流程如左圖所示(摘自ARGO官網) |
科技部海洋學門資料庫過去曾設立之ARGO與SVP浮標資料顯示網頁
(10)自走式水下載具(Autonomous Underwater Vehicle, AUV) Seaglider:
前述之ARGO浮標觀測網雖然每天都為海洋研究人員提供了全球海洋裡大量的溫、鹽剖面觀測數據,但是如果將ARGO浮標分布圖放大來看,例如上圖所示之臺灣附近海域,資料點分布還是頗為疏鬆,尤其是ARGO浮標是隨著背景海流漂流,會流去哪兒是由老天決定,套句人們開玩笑時會說的話:「怎麼該來的都不來,不該來的都來了?」研究人員有時不免也會懊惱「沒興趣的地方一堆浮標,而有興趣的海域怎麼半顆浮標都沒有?」如果想要在有興趣的地點維持常態性的定期觀測,過去不外只有兩個法子,其一是在定點放置錨碇觀測系統,另一則是定期派船去做觀測,這兩種都是成本高花費不貲的作業方式,第一種需要大量儀器前置成本甚高,第二種則除了儀器成本外還有可能更高的船隻使用花費(油料、人事等等),另外天候不佳(如颱風)時第二種方式還根本無法執行,因此開發自走式水下載具AUV來協助觀測作業便有很大的需求(軍事、研究以及海下工程等),近年來市場上也陸續出現各種高性能、商品化的產品,這些製品大致可以分為本身無推進動力和本身具推進動力兩大類,前者機身裝有機翼可藉助滑翔方式在水中運動,行進速度甚為緩慢,但因電力消耗低,在海中持續作業時間可長達一年左右;至於後者則外觀類似魚雷並以尾端螺槳推進,因此可在強流區頂流行動,但因耗電量大,在水中作業時間僅能維持數日而已。這兩種型式的AUV均可裝置觀測儀器在近岸淺海區操作或潛至數千公尺深,並依照事先設定的航線進行水文、流速、海底地形、地質剖面等的觀測。
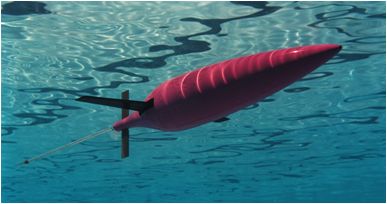
對於大尺度海洋研究而言,較理想的AUV自走式水下載具應當具備下列幾項特性:(1)尺寸別太大、太笨重,(2)購置成本要低,(3)穩定性要高,能長時間在海下作業,(4)要容易操作使用。顯然符合這些特性的AUV大概只能選擇無推進動力式的,目前市面上有三型均採滑翔式運動的無推進動力AUV:(1)Slocum glider (Teledyne Webb Research),(2) Spray glider (Scripps Institution of Oceanography, SIO),以及(3) Seaglider (Applied Physics Laboratory, University of Washington, APL-UW)(括弧內為製造單位),下圖為此三種滑翔式AUV的照片。[這三型glider中有兩型的名字都是為了紀念Joshua Slocum (1844-1909,在海上失蹤)而取的,他是歷史上成功完成單人帆船環球航海的第一人,所駕駛的帆船就名為Spray](摘自WHOI Slocum Glider,Spray Glider以及SIO Underwater Glider Spray等網頁)。滑翔式AUV之所以能夠在水中下潛或上浮,所依賴的動力來源是和ARGO浮標一樣,是靠改變機體體積(藉機體外部之油囊,Slocum有一型則是利用石臘熱縮冷脹特性)產生浮力或負浮力而爬升或下沈,因此從工作原理看,無推進動力滑翔式的AUV其實頗相當於是一具加裝了翅膀以及尾翼的ARGO浮標。
 |
 |
|
 |
(上左)Slocum glider
(Teledyne Webb Research),工作深度200m(摘自WHOI
Slocum Glider)。 |
 |
臺灣大學理學院貴儀中心海洋探勘組引進之Seaglider。 |
臺大海洋所近年與美國WHOI、SIO以及APL-UW等機構有密切合作關係,在西菲律賓海以及南海北部共同執行了許多海洋研究探測工作,我方人員並實際參與APL-UW所出動的Seaglider施放、回收、操控以及資料分析等作業,待相關作業技術累積、建立後我方始於2016年下半年購買引進一具Seaglider水下滑翔觀測載具(如上圖)。此Seaglider體長約1.8公尺、最大直徑0.3公尺、衛星通訊天線長1公尺,重約52公斤,紡錘型載體除了可裝載鹽溫深(CTD)探針外,尚可加掛螢光探針(測葉綠素)、溶氧探針、紊流探針、光照深度探針、都普勒流剖儀等。APL-UW Seaglider機體及機體內部各單元之構造如下圖所示。
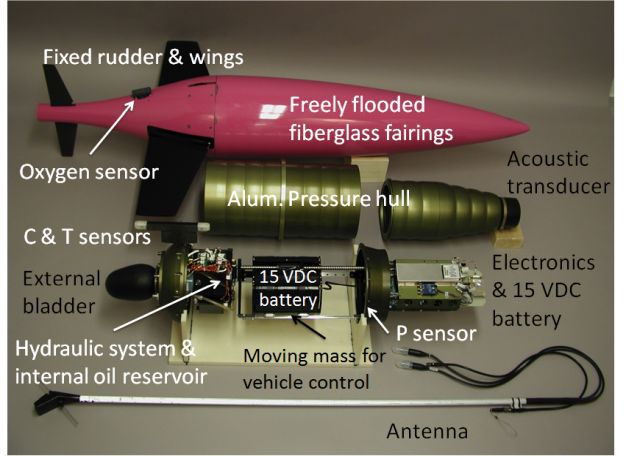 |
APL-UW Seaglider內部構造分解圖。 |
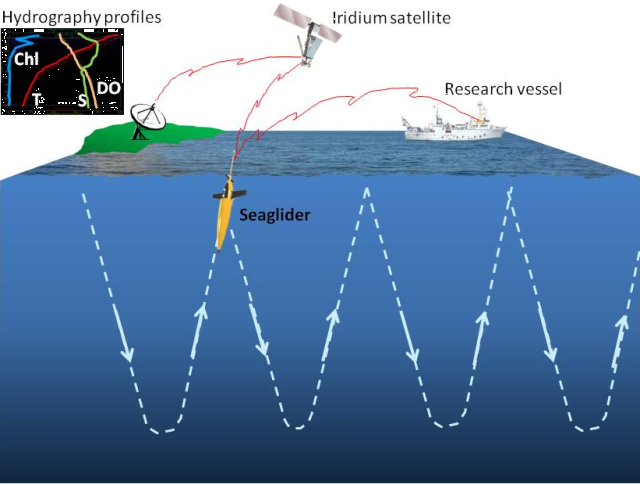 |
Seaglider水下探測作業方式示意圖。 |
Seaglider是以機體內的液壓幫浦將液壓油抽出或打入機尾外部的油囊(人工魚鰾),藉以改變整體的體積而改變比重,重而製造出浮力或沉力以往來海面和水下1000公尺深之間取得水文剖面資料(見上圖);當Seaglider浮到海面時,即可透過銥衛星(Iridium)通訊,傳送GPS定位資料以及觀測資料回實驗室,也可接收行動控制指令以調整沉降和上升角度和方向及下沉深度等。Seaglider由鋰電池供電,可依照任務需求連續在海中觀測,由於耗電量非常低,觀測任務連續作業時間可長達10個月以上。從價格來衡量,Seaglider售價相當於海研一號研究船出海10-15天的花費(以每日40萬元計),跟一整套75 kHz都普勒式流速剖面儀(含45吋大浮球、兩個深水音響釋放儀、錨碇耗材等)的總價不相上下,但以其觀測方式、機動性和取得的資料量跟使用研究船做同樣項目、同時間長度的觀測來比,相對CP值極高。下圖為海研一號施放Seaglider作業的一些照片。
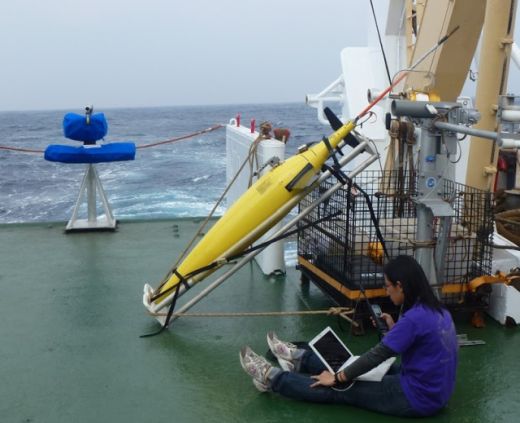 |
施放作業前檢測Seaglider通訊狀況(海研一號)。 |
 |
 |
(左)海研一號後甲板正在施放Seaglider。 |
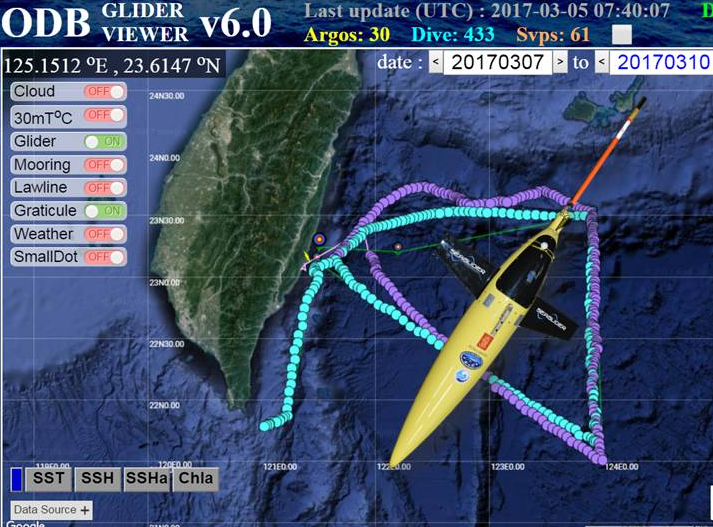
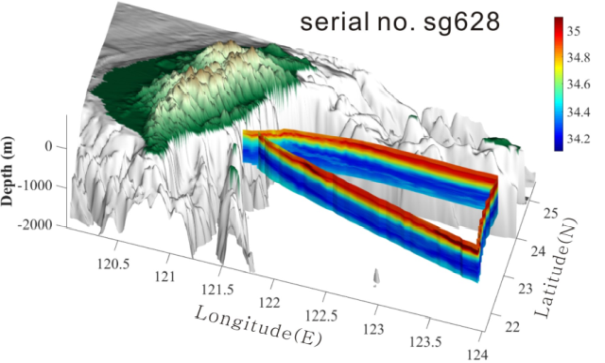
臺大海洋所於2016年下半年所引進之水下滑翔觀測儀Seaglider隨即於同年12月8日在鵝鸞鼻東南方首航下水,經過3個月連續探測黑潮與海洋渦旋,已於2017年3月6日經臺東成功地區漁民協助藉由延繩釣漁船收回。首航3個月期間總計完成434回垂直剖面探測,蒐集了鹽-溫-深(CTD)、溶氧(DO)、螢光(fluorescence,695 nm)、後向散射(backscatter,532 nm和700 nm)等資料共計849,455組,航程水平距離約2095.1 km,航線總軌跡(如下圖)長約2296.3 km,總航行時間約87天(~2093小時)。
 |
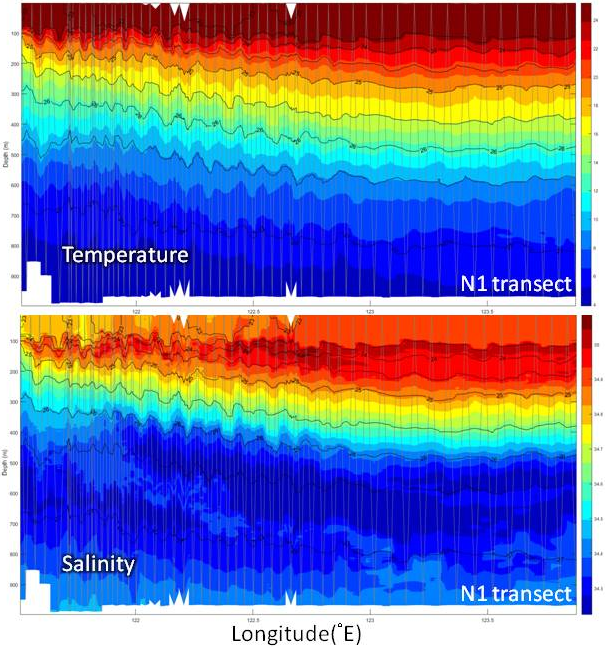
臺大海洋所Seaglider(編號sg628)第0001航次第一趟大三角探測(上圖淺藍色三角形)所得的鹽度剖面,如下圖(上)所示。仔細檢視第一趟探測在北邊測線(N1測線)所得的溫度和鹽度斷面分布,見下圖(下),可以看到許多細微的海洋水文構造,例如內波的影響以及水團層疊交錯(interleaving),尤其在中層水(大約400到800 m之間)範圍內,具有類似南海特性的中層水(South China Sea-like Intermediate Water)和北太平洋中層水(North Pacific Intermediate Water)二者間水平交錯現象特別明顯。從sg628第0001航次所獲得的這些正冬季觀測資料非常珍貴,除了能彌補過往因研究船受天候限制而欠缺嚴冬觀測資料之憾外,還能幫助我們更深入了解臺灣東方黑潮的一些變異行為。
 |
臺大海洋所Seaglider(編號sg628)第0001航次所測之鹽度剖面。 |
 |
上圖北斷面之溫、鹽剖面,圖中細線為sg628海中運動軌跡。 |
(11)船舶雷達(Marine Radar):
雷達(Radar)是英文全名RAdio Detection And Ranging(無線電偵測和測距)或RAdio Direction And Ranging(無線電測向和測距)簡稱RADAR的音譯,指的是藉由天線發射出電磁波,電磁波遇到遠方物體產生反射回波,然後根據天線接收到的反射回波來偵測遠方物體、並計算其方位與距離之裝置。雷達是第二次世界大戰期間基於軍事目的而出現的機密產物,但其所應用之物理概念則是奠基在之前近百年來電磁輻射實驗所建立的基礎上。戰後雷達技術解密,1950年代起雷達開始普遍使用於海運商船,作為海上避碰以及導航的重要裝備,時至今日雷達早已成為海上航行船舶的必備品。下表摘自radartutorial.eu,顯示雷達所用頻率頻帶(或又稱波段)之範圍與名稱(上排紅色列為第二次世界大戰期間為保密所用之頻帶名稱,下排藍色列則為新名稱,不過舊名稱仍在沿用;舊名稱各波段之頻率範圍為 L band: 1215-1400 MHz, S band: 2300-2500 MHz, 2700-3700 MHz, C band: 5250-5925 MHz, X band: 8500-10680 MHz, K band: 24.05-24.25 GHz)、以及各頻帶所對應之波長;雷達如按天線發射方式又可分為連續波式(Continuous wave, CW)雷達以及脈衝式(Pulse)雷達,船舶雷達均為脈衝式雷達,常使用的頻帶則為X band,所以又稱X band脈衝式雷達;下一小節所述的高頻測流雷達則為連續波式雷達。脈衝式雷達系統各組成單元如下圖左所示。

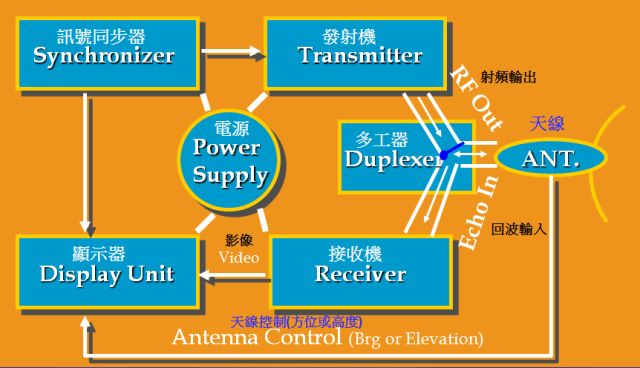 |
脈衝式雷達系統各組成單元示意圖。(摘自http://nrotc.wisc.edu)
|

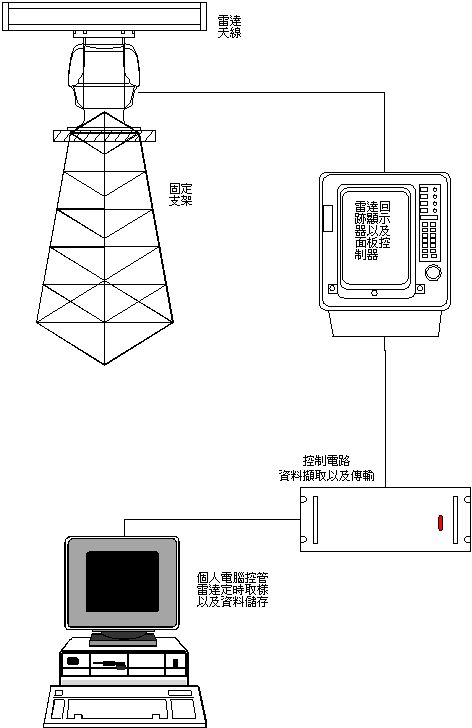 |
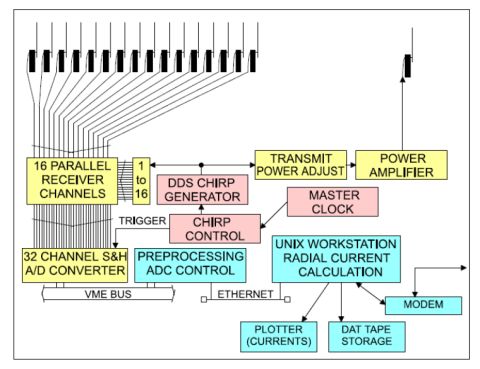
船舶雷達是設計給航海避碰、導航使用,採用棒形天線產生在垂直方向上呈扇形的雷達波束(水平向上之波束角度很窄,但垂直向之波束則頗寬,以Furono雷達6呎長天線為例,其垂直方向上的波束寬度為25.0度,但水平方向上的波束寬度則僅為1.2度),並以旋轉天線方式掃瞄四周海面(如上圖右)。船舶雷達之作用在於偵測運動或靜止的各型目標物(船隻以及陸地),因此海面粗糙體(指波浪)造成的回波訊號(稱為Sea Clutter,雨滴的干擾則稱為Rain Clutter)則是不希望呈現出來的背景雜訊,因此雷達主機上設有消除Clutter的濾波功能。可是對於海洋科學觀測目的而言,Sea Clutter才是所需的訊號,從Sea Clutter訊號可以再推知現場之波浪狀況以及海面下的現象(如內波、海洋鋒面等),是以當代新建的研究船上多會安裝為科學實驗而用的雷達。海研一號開風氣之先,早在2000年就已安裝了一套由臺大海洋所自行開發的數位雷達,其主體是由一套船用雷達(Furono FR-8251)改裝而成,系統架構如左圖所示(至於當初為何選用Furono雷達?原因在於當時只有Furono本地經銷商可提供一些改裝所需比較詳細的技術資料,另外還有Furono雷達價廉物不差也是重要因素),在海研一號出海作業時即可不斷地將雷達所測到周遭海域的海面狀況以數位以及圖檔方式儲存在電腦內,這項裝備以及所記錄之雷達資料對於後續之南海內波研究現場作業(可在海上預先偵知內波到來)提供了很大的助益。下圖左為裝置在海研一號主桅最高處的FR-8251雷達天線,下圖右則為放置在海研一號電儀室內的雷達操控電路(機櫃上方黑盒)、雷達主機(機櫃上層)、螢幕(機櫃中層)以及雷達操控電腦(機櫃下層左),雷達電源位於右下角桌面下。 |
 |
 |
接著簡介雷達之所以可以觀測海面現象的基本原理。上段所述之Sea Clutter主要由兩種物理機制所造成,其一為鏡面反射(specular reflection),假設雷達天線距海面不很高,那麼雷達波就會以近乎貼著海面的角度向外傳播(稱Grazing incidence,低掠照射),如果海面波形甚陡(例如在碎波前緣),海浪波形面對雷達來波就有可能正好形成類似平面鏡或凹面鏡而產生正反射的情形,此時雷達天線就會接收到很強的回波信號(稱為sea-spike),這種情形即是鏡面反射。其次另一種更常見的情況則稱為布拉格散射(Bragg Scattering);當雷達波接觸到海面上之粗糙體(或稱散射體,scatterer,也就是小波)時會發生後向散射(Backscattering),如果海面小波之波長(Lw)和雷達波之波長(Lr)二者能滿足 Lw = nLr/(2 cosθ),n=1,2,3,...之條件[稱為布拉格共振(Bragg Resonance)條件],式中θ為雷達波束貼著海面傳播的角度(稱為掠角,Grazing angle,就是雷達波束與水平面之夾角),那麼雷達波之回波便會產生建設性的加成作用(如下圖),因此Sea Clutter回訊主要就是反映雷達照射區海面上具有多少能夠產生布拉格共振作用的小波以及這些小波的強度分佈變化(根據FR-8251雷達之規格知LR為3.2cm,θ~3-5°,因此可估出能產生布拉格共振作用之小波波長約在1.6至2.0cm之間)。
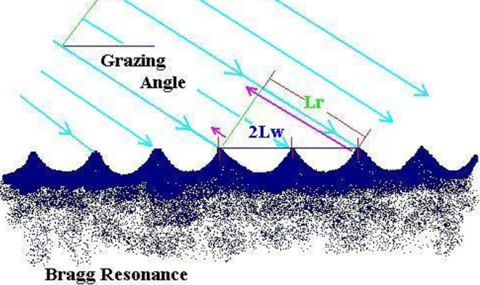 |
布拉格共振現象之示意圖,圖上 Lw為海面散射體之波長,Lr為雷達波之波長,紅箭頭則表示海面散射體所產生的後向散射波波向,如Lw = Lr/(2 cosθ)則紅箭頭所跨範圍內這三個散射體之後向散射波均為同相位(右方其它散射體所產生之後向散射波也會同相),因此就會產生建設性的加成作用。(從惠更斯原理,海面每一個散射體都可視為是一個會發出散射波的點波源,如果點波源數目夠多,而且相位都能匹配好,那麼便能形成反向的平面波再傳回雷達天線)。 |
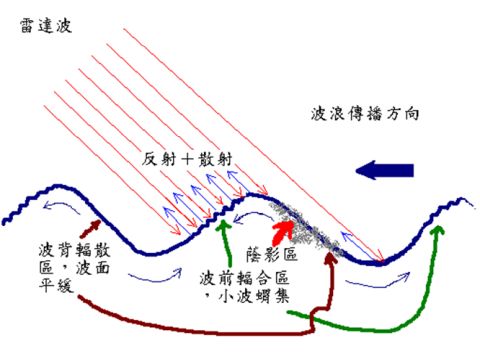 |
由於小波的強度以及分佈情形和海面風應力大小以及背景大波所引起之水分子運動分佈情形有密切關係,例如在大波之波峰前緣處,水流係呈現水平輻合(波峰處波致水流為順波向,波谷處波致水流為反流向,因此在波谷後方與波峰前方水平流速為匯合),故小波在此處之能量密度較大,亦即海面會比較粗糙,反之在大波背面,水流係呈現水平輻散,因而小波之能量密度就會較小,海面則較為平滑(如左圖之示意圖所示,圖中黑色細曲線表示波致水流的運動方向);是以又可透過這重重的關係將Sea Clutter回訊強度再與海面波浪場特性聯結起來。 |
過去的研究(如Alpers, 1985)指出雷達是海面粗糙度的感應器,而上述之大、小波間關係或可用一簡化的公式來近似:雷達回訊強度通常用雷達截面積率(Normalized Radar Cross Section,簡稱NRCS) σ來表示,假如海面水平流速向量U之輻散為 div(U)H,式中div( )H為水平梯度運算子,則根據第一階近似之雷達成像原理,海面上NRCS之相對變化(∆σ/σo )和水平流速輻合量(負輻散即是輻合)會呈正比,即∆σ/σo ∝ -div(U)H,但此式正比係數之數值大小則和雷達波長、雷達波掠角、方位角、以及海面風速等等因素均有關,上式中 σo為一個具代表性的海面NRCS值(Brandt et al.1996)。海面大波所引起之水平流速輻合或輻散會造成小波蝟集或衰退,故小波強度分布可和大波波場特性產生聯結,這就是雷達回訊強度可以有效反應出波浪場特性的原因。同理海面下如果有內波,內波會在海面造成水平流速輻合或輻散,因此也會對海面波浪場造成影響(後者又再影響到小波的蝟集或衰退),故使用雷達也可以觀測到水下內波對海面的效應,以下舉一些雷達影像為例,包括內波、海面波浪、水龍捲風、河口沖淡水舌以及疑似油污分布等現象,說明雷達對許多物理海洋學現場實驗都是一項很有幫助的輔助觀測工具。[註:Alpers, W. (1985) Theory of radar imaging of internal waves. Nature, 314, 245-247; Brandt, P., W. Alpers and J.O. Backhaus (1996) Study of the generation and propagation of internal waves in the Strait of Gibraltar using a numerical model and synthetic aperture radar images of the European ERS1 satellite. J. Geophys. Res., 101, C6, 14237-14252. ]
 |
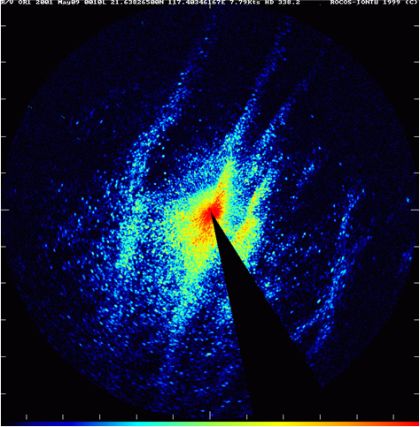 |
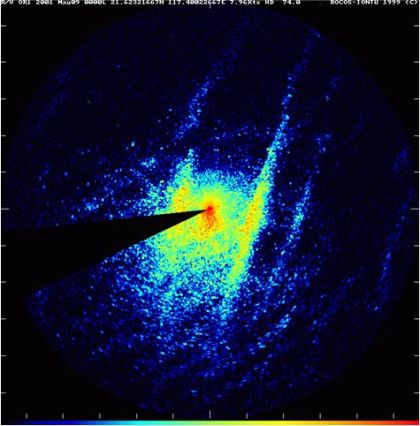
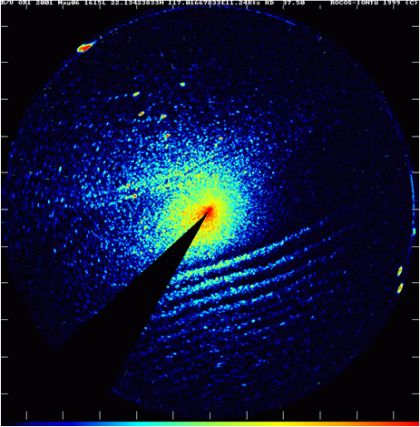
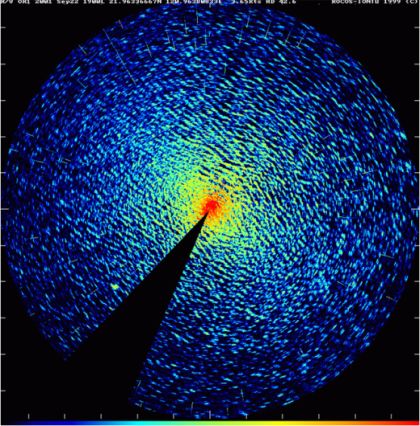
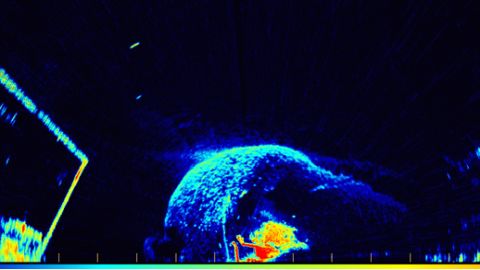
內波:上圖為海研一號在東沙環礁東北方作業觀測到非線性內波波列通過時的雷達影像(顏色只是代表回波訊號的相對強度,圖上格線每格為1 km,圖幅大小為12x12km2,中央黑色尖角扇形為雷達訊號被船尾後桅遮蔽區),(左)2001年5月9日0000L,(右)十分鐘後(2001年5月9日0010L),可以很清楚看出當地內波波列傳播方向是向著西北西方(從連續圖像可以估算非線性內波之波長、波向、波速以及波包中波的個數等資訊)。下圖左為2001年5月6日1615L海研一號在臺灣淺灘西南方陸棚區作業經過孤子內波波列的雷達影像(波向北北西方向傳,波長約600m,波包中波的個數用肉眼判斷至少可數出7個以上),圖上許多長形小紅點為漁船,大紅塊則為商船;下圖右為2001年9月22日1900L海研一號在鵝鸞鼻東方海上頂著大風浪向東北方航行時海面波浪場的雷達影像(格距為1 km);連續快速觀測的波浪雷達影像資料可用以估算波浪場的方向能譜,坊間稱作「測波雷達」或是「雷達測波儀」的裝置,主要硬體多半也都是一座由船舶雷達改裝的數位雷達。
 |
 |
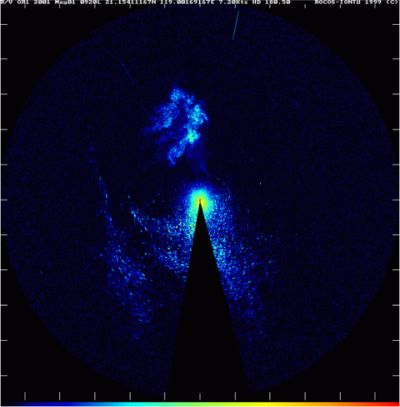 |
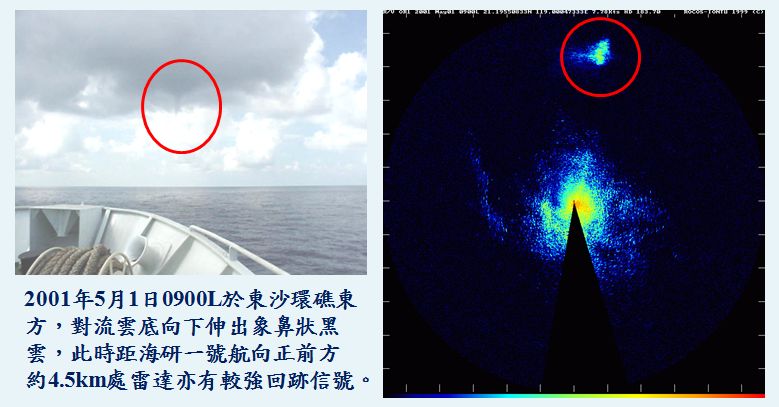
水龍捲風:2001年5月1日海研一號在東沙環礁東方的南海海盆作業,當日早上0900L向北航行時發現船艏前方雲層底部向下伸出象鼻狀黑雲(如左上圖照片中紅色圓框內),同時間之雷達影像則顯示船艏前方約4.5 km處海面出現較強的回波訊號,20分鐘後(0920L)的雷達影像如左圖,可看出原先(0900L)面積不到1 km2且呈近似橢圓形狀的強回跡區,到0920L其範圍變大同時也變形成為一個寬約1 km、長約2 km的馬蹄鐵形狀,隨後這片強回跡區逐漸消散不見。由這段過程看來,很可能是雷達觀測到了一個還沒發展好便「胎死腹中」的海上水龍捲風發展過程,雷達圖像上的強回跡區很可能便是象鼻雲下方的強風區(當地也可能有降水)。 |
 |
河口沖淡水水舌:左圖為2005年5月15日1200L淡水河口雷達回跡圖(此圖為每1.5秒一張共32張雷達連續圖像之平均,藉此可以降低外海波浪效應的影響),顯示淡水河口退潮時段沖淡水形成的水舌向外海伸展的情形,水舌區內色調高於外圍表示水舌區內因水流輻合小波蝟集海面粗糙故後向散射較強。(圖左方直線狀物體為臺北港防波堤, 圖底部中央之建物則為淡水漁人碼頭出海口之防波堤(圖底橫軸所示之格距為0.5 km)。 |

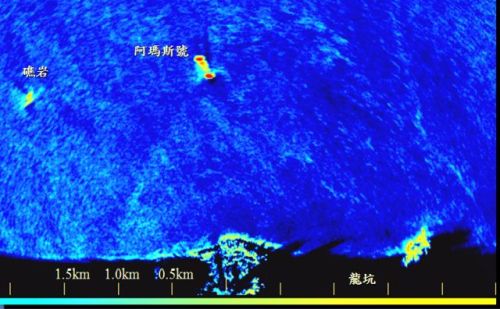
 阿瑪斯號擱淺處放大照(為上圖放大,2001年2月9日1240L) |
油污分布:2001年1月14日約17點左右, 屏東恆春海巡隊通報希臘籍3萬5千噸貨輪阿瑪斯號(AMORGOS)在龍磐公園距岸約1.8km處附近海域暗礁擱淺,1月17日龍坑近岸發現油污,18日起油污範圍擴大。上圖為2001年2月9日下午臺大海洋所技術人員在龍磐公園執行雷達觀測時(位於龍磐公園上方斷崖一座廢棄哨所碉堡旁)所拍阿瑪斯號擱淺處附近全景,由照片隱約可見沿該船船尾下風方向有兩道白色跡線(左圖);下左圖則為2001年2月9日下午1251L於龍磐公園所測之雷達平均圖像,阿瑪斯號船尾後方(下風方向)有一片回波訊號較弱區域,有可能是油污,也有可能只是船體背風面受遮蔽作用所致,當時因風浪甚大並無現場水樣資料以資比對故無法確認是否為油污,不過在左圖照片所示阿瑪斯號船尾後方白色跡線處,雷達圖像上確實也呈現出回訊強度突然降低的異常狀況。 |
 |
|

(12)高頻雷達(HF Radar), CODAR (COastal raDAR):
高頻(High Frequency, HF)是指無線電頻譜中頻率為3-30 MHz的波段(見前小節頻帶表最左欄),所對應之波長則為100-10m。至於CODAR則為海岸雷達(COastal raDAR)之簡稱,是一種使用HF波段無線電波來量測海面海流的雷達裝置。那麼為什麼要使用HF波段呢?原因在於比HF更高頻率的雷達波都是以直線傳播,因此視線內如果有障礙物那麼雷達波便會被阻擋而反射;但對HF波段無線電波而言,由於海水對HF波段具有導電性,因此縱使地球表面為曲面形狀,但HF波段無線電波仍可以沿著海面傳播到超越視線以外的距離(可大於70 km),是以才會選用HF波段雷達來量測大範圍海域裡的海流。高頻雷達觀測海流所使用的原理和前小節雷達觀測海面現象的基本原理一樣,都是根據布拉格共振效應所產生的後向散射(Backscattering)作為量測的參量;然而不同的是,前小節雷達觀測主要呈現的是海面散射體後向散射回波的強度,但高頻雷達測流關心的則是後向散射回波訊號中散射體本身頻率的變化,如果散射體本身頻率有變就表示有流,再從都卜勒頻移關係式便可推估出海流大小。
近代使用於大面積海流觀測的長距型高頻雷達(long range HF Radar),工作頻率約在5 MHz左右(波長約為60m),使用直立型之鞭狀發射天線,因此天線發射出之雷達波會以地波(ground wave)方式沿著海面/地面向四週傳播;當雷達波遇到障礙物以及崎嶇不平海面(海面上幾乎無時無刻都有波浪)即會產生後向散射回波(Back scattering)。海面上後向散射回波信號主要是由雷達波與海面粗糙度(即波長為雷達波一半波長之海面波浪)經由布拉格共振(Bragg Resonance)所產生(如下圖上)。由於構成海面粗糙度的海面波本身是週期性的運動,因此雷達回波頻譜圖上就會在這些波所對應之頻率處顯示出能量尖峰(如下圖下之上半部)。另方面,若海面有流時,表面海流會對構成海面粗糙度之波浪產生都卜勒效應(Doppler effect)而使波浪頻率偏移,因此當海面海流在雷達天線徑向方向上具有流速分量時,雷達波後向散射回波信號中即會顯現出海面海流對海面波浪所造成頻率偏移的效應(如下圖下之下半部),是以利用雷達所測得回波之頻移便可反算出表面海流大小(指雷達天線徑向方向上的流速分量)。由於流速為向量,需由二正交之分量才能適當表達,然而一台雷達只能提供其天線徑向上各點海流遠離或接近天線的資訊,故需結合兩座以上雷達的觀測資料才得以表達出雷達共同涵蓋區域內的海流向量流場資訊。
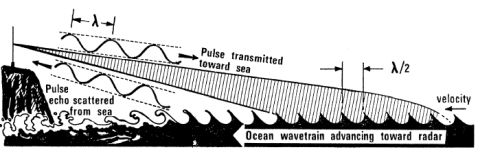 |
左圖:近岸電台向海發射HF波段(波長為λ)無線電波,遇到海面上波長為λ/2之波浪後,因布拉格共振效應會產生後向散射回波之示意圖。 |
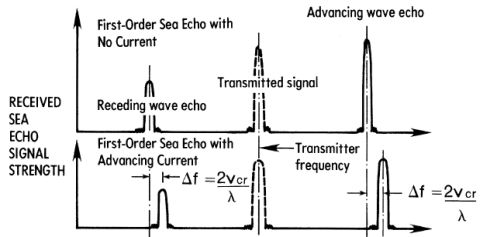 |
左圖之橫軸為相對頻率(即減去雷達所發頻率後,故橫軸中央頻率為零),(上):如果海面上沒有海流,那麼回波頻率能譜中能量尖峰會在零頻率左右兩側對稱出現(此處即為波長λ/2海面波浪對應之頻率);(下):如果海面有流,那麼都卜勒效應會對波浪產生頻移,因此能量尖峰的位置就會平移(如海流流向雷達天線方向,流速為Vcr,則此頻移為∆f = (2Vcr)/λ)。(關於波浪的都卜勒效應參閱第七章第二節波浪運動) |
高頻雷達測流的基本原理就是這麼簡單,但是硬體系統設計要如何才能達成呢?或許大家會想說找一台類似雷達測速器一樣的雷達不就成了嗎?這話當然沒錯,但是雷達測速器使用的是10 GHz左右X波段,天線發出的是筆形波束(pencil beam),只能照射到短距離海面上很小一片海域,然而HF波段的頻率比X波段低了數百倍至千倍,天線尺寸也就會大了很多很多倍,加以要做大範圍大面積量測雷達功率也需加強,因此硬體設計就一定會有很大的不同。目前商品化的長距型HF測流雷達大致有兩類,一類稱為精簡天線式(Compact antenna type),如CODAR系統;另一類則為陣列天線式(Phased-array antenna type),如WERA(WEllen RAdar)系統。前者使用一支直立的鞭狀發射天線,而接收天線則是由兩支相互垂直的雙極(Bistate)水平天線以及一支單極(Monostate)的垂直天線所構成;後者則使用四支發射天線以及12-16支直立並按等相位差設定間距後以直線方式排列的接收天線陣列,因此需要很大的空間位置以裝設陣列天線。臺灣大學海洋研究所自2010年起即與海軍軍官學校和海軍大氣海洋局三方合作,共同在臺灣東北部蘇澳與漢本二地設置、維持了一組使用長距型CODAR系統觀測的高頻雷達海流監測站,這幾年下來累積了一些第一手的使用經驗,因此以下我們主要是介紹CODAR系統,而WERA系統部份只會很簡略地帶過,對WERA陣列天線觀測系統有興趣進一步了解者請自行參閱WERA官網。
CODAR系統之發射天線是以360°全方位(omni-directional)方式向外發射無線電波,再以相互垂直排列的三支接收天線來判定回波的方向;下列二圖分別為漢本站的發射天線(左)以及接收天線(右)。此外,CODAR系統判定產生回波之散射體的距離是使用與一般雷達不同的方法;在上小節曾說過船舶雷達是藉由所發脈衝波之發射時間與回波返回時間的時間差來估算物體與雷達之距離,但CODAR則是使用稱為頻率調變連續波(Frequency-Modulated Continuous Wave,FMCW)的變頻方式測距 ,也就是CODAR所發射出的雷達波頻率不是固定不變的,而是使用頻率隨時間線性增加或減少的方式(稱為線性調頻,這種信號和鳥發出的啾啾聲很像,因此又稱為啾聲,chirp;是以CODAR系統是FMCW雷達,也可稱為Chirp雷達),因此同一時間離雷達不同距離的海面上收到的雷達波頻率就會不同,而接收天線在同一時間所接收到來自不同距離海面的回波訊號之頻率同理也就會不同了,故按照回波訊號的頻率便可以用來判別散射體與雷達之距離。
 |
 |
 |
|
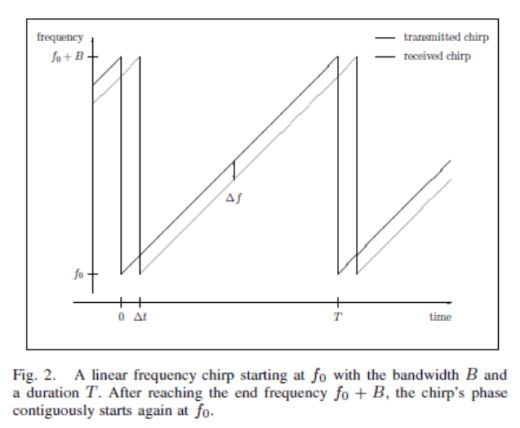 |
FMCW測距原理示意圖。若雷達收到散射體回波時間與其發射時間之時間差為∆t,散射體與雷達之距離即為(c∆t)/2,c為光速,而雷達所收到該散射體回波之頻率與雷達所發之chirp信號會保持固定的頻率差(∆f),因此知
∆t = T(∆f/B),由回波之頻率差可得出散射體與雷達之距離。 |
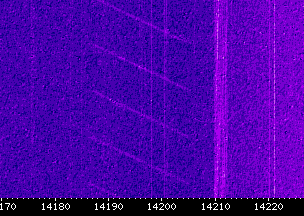
CODAR系統的三支接收天線分別稱為Loop 1、Loop 2與Monopole(或稱Loop 3),其中水平的兩支Loop 1與Loop 2用作方位判定,Loop 3則用作將觀測資料標準化(Normalize)用。系統監測作業起動後發射天線每秒會發出一次chirp信號的無線電波,然後將三組接收天線每秒所接收到的chirp回波信號作快速富立葉轉換(Fast Fourier Transform, FFT)以分解得出32個(或64個,視chirp信號的頻寬而定)不同頻率的成份,每一個成份即代表一個距雷達站不同距離海面位置上的回波訊號強度(不同頻率即相當不同距離,其原理如上圖所示);經1024秒後,系統又會對各不同距離點所累積之時序資料再進行一次FFT,這次產出的則是三組天線的自能譜以及彼此的互能譜資料(Cross Spectrum ),此資料組之副檔名為CSQ;隨後系統又會再將該時間點與前後之CSQ 檔進行平均,約30分鐘自動產出一筆稱作「短時間互能譜」資料(Short Time Cross Spectrum File, 副檔名為CSS),再之後系統又會將所收集之CSS檔再進行180分鐘的平均(此平均時間所需長度為經驗值,國外實例驗證指出如此可有效降低雜訊干擾影響);再由平均後各不同距離點的自能譜資料能量尖峰判斷找出後向散射體之頻率偏移量(以波長為60m之電磁波為例,所對應之海上後向散射體指的是波長為30m的海上波浪,後者之頻率可根據水波理論由波長推知),再由頻率偏移量以及都卜勒效應公式便可算出各不同距離點上海流向著雷達天線方向上的流速分量。另外再從互能譜資料利用三組天線因位置不同致使收到的回波訊號會有相位差的關係,以簡稱為MUSIC(MUltiple SIgnal Classification)的方法根據互能譜矩陣之特徵向量來估算後向散射體產生之回波的來向,經彙整綜合所有點位之計算結果後即可得出以雷達站為中心,向外以固定距離分隔之環狀域(circular annulus)上每一點的徑向海流資料(Radial Velocity File, RUV File)。若有二站以上的監測站,即可再透過中控站系統將各監測站的RUV檔合成為向量型態的表面海流資料(Total Velocity File, TUV File)。RUV 檔與TUV 檔皆為一小時自動輸出一次。下圖為蘇澳與漢本二站CODAR觀測資料傳輸以及後處理、展示與入庫之流程示意圖。
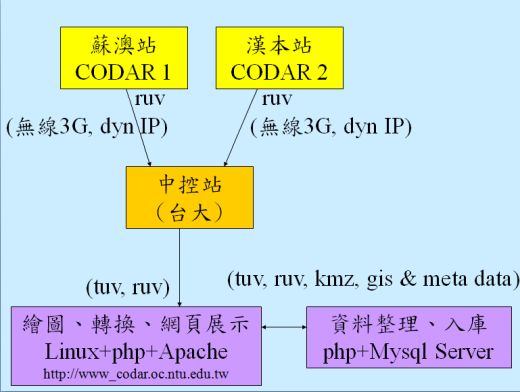 |
左圖為蘇澳與漢本二監測站CODAR資料傳輸、後處理、入庫、網頁展示流程示意圖。 二站所有資料傳輸、處理與展示均為全自動化作業,內容包括網頁伺服器、檔案伺服器、以及資料庫伺服器,所有資料流自動連線程序均使用自行開發撰寫之相關程式或程式化腳本指令。基於成本考量,展示端伺服器係採用自由軟體LAMPS (Linux + Apache + Mysql + PHP + SSL)架構,將中控站所收到由遙測站回傳之自能譜、自能譜訊噪比、遙測站徑向海流、合成表面海流等資料分別定時由網路傳輸至展示系統之檔案伺服器,後者這端再繪製出CODAR自能譜、合成海流、流場動畫與日平均海流等的分佈圖然後匯入網頁伺服器對外展示(如下圖),資料應用單位則經由檔案伺服器下載最新的觀測數據參考使用。 |
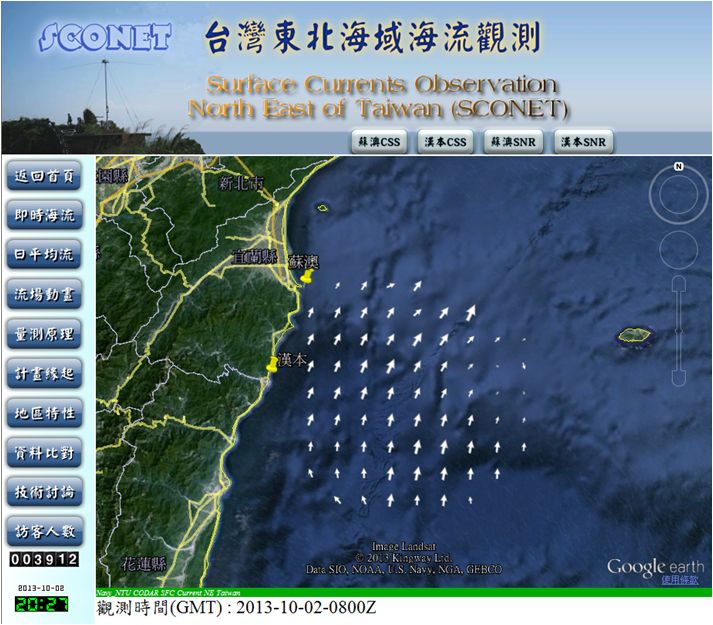
(上圖)蘇澳與漢本二站CODAR所觀測臺灣東北部表面海流分布一例。
 |
左圖:WERA系統各主要組成單元的示意圖。 摘自:Gurgel K.-W., H.-H. Essen and T. Schlick (2001): The University of Hamburg WERA HF Radar - Theory and Solutions. First International Radiowave Oceanography Workshop ROW 2001 Proceedings. |
至於WERA系統,其發射機部份是和CODAR一樣採用FMCW方式作業,但接收機部份則完全不同。WERA是採用波束合成(beam forming,有關原理可參閱Youtube網頁 Phased Array Antenna Beam Steering Animation , Phased Array Animation )方式,將每次發出chirp訊號後12-16根接收天線同步收到的回波訊號藉由不同的時間延遲重新疊加處理,這樣便可解析出不同來向的後向散射訊號,再將這些不同來向的訊號以FFT法處理後又可按不同距離再行分離,最後就可將雷達照射區內按角度與距離劃分成很多的取樣區塊,並得出各區塊內的回波訊號量。當各區塊內的資料量累積到足夠多次數後便可計算每一區塊內的回波能譜,再根據能譜所示頻率偏移量以及都卜勒效應公式算出該區塊內海流向著雷達天線方向上的流速分量,同樣WERA系統也需要兩組不同位置雷達站的徑向海流觀測資料才能合成海流向量(對WERA系統有興趣者請參閱WERA官網)。
對於大面積海表面海流即時監測當前最經濟的作法就是使用遙測方法;岸基高頻測流雷達(如CODAR)即是一種有效的遙測工具,具有觀測資料空間涵蓋區域大(理想狀況下長距型CODAR觀測半徑範圍可達100-220 km,見CODAR官網)、時間解析度高(可由每10分鐘密集觀測至1小時或數小時平均後輸出)之特點,當海流觀測資料數量累積夠多即可進行統計分析及統計預報;另方面即時監測資料亦可透過資料同化作為初始條件或邊界條件納入海洋數值模式進行海洋環境現報或預報以提供更為細緻的海洋環境資訊。雖然以當前技術可以使用遠端遙控以及無線網路資料傳輸而達到觀測現場完全無人化的作業方式(只需派人定期或不定期赴現場維護保養)。但由於雷達站需緊鄰海濱,發射與接收天線皆在室外(與水線越近越好),長期受高溫烈日曝曬以及高鹽高濕海風日夜吹拂,颱風期間或雷雨來臨時更有強風吹襲且有遭受雷擊的風險,各項室外裝置容易因材料劣化受損失效,維持系統正常運作實仰賴一批熟知系統軟、硬體的技術人員能迅速維修。另方面,臺灣海域地處亞熱帶,不論地理環境或是氣候條件均與中、高緯度地區頗有差異,是以原廠系統作業手冊中一些準則規範就往往未必能完全適用,而需就局地特性加以調整。例如CODAR作業手冊就未述及天線所能承受之最大風力;然而過去蘇澳與漢本二站曾經歷過多次颱風或惡劣天候,蘇澳站雷達發射天線即因強風或雷擊而分別受損三次,而漢本站接收天線亦曾遭颱風巨浪沖毀一次,由這些事例似可推判CODAR系統發射天線所能承受的最大風力(平均風)範圍應僅為13級以下(過此則一定會受損),因此13級風當可作為防颱評估是否應撤移天線之參考依據;又如低緯度地區電離層活動較活躍且電離層底之高度亦較低,是以長距型高頻雷達回波訊號受電離層干擾之影響便遠較中緯度地區為大,有效之海流觀測範圍亦會大為縮減(超過100 km後資料品質即會大降),因此在低緯地區需另外設計方法在CODAR資料後處理前即將不良數據預先剔除(我們目前是藉長期統計定出不良資料之時空範圍分布,再依此剔除),如此可以提昇後處理資料之可信度;另外為了現報或資料同化目的我們也建立了方法可以「合理」填補或內插觀測區內因資料品質不良而造成的資料空白。簡言之, 岸基高頻雷達測流雖是相對經濟且有效率的觀測方法,但測站維持需要一批專業技術人員,而觀測資料正確與否亦需專業技術人員處理與判讀,在應用這類資料前宜多了解其特性、準確度以及一些性能侷限,切忌盲目相信就盲目使用。
(13)衛星遙測(Satellite Remote Sensing):
隨著衛星科技的進展,當前地球上空布滿了許許多多各式各樣的監測衛星,每天都將衛星裝載的被動式(passive)或主動式(active)感測器所觀測到地表或海面的大量資料傳送回地面接收站,這些資料經各地的資料中心處理後再轉給應用單位使用。衛星遙測資料具有資料獲取速度快、涵括地理範圍面積大、且資料品質不隨地域而異能維持品質一致的特點,正好能彌補海上觀測測站點位疏鬆、作業緩慢耗時的缺憾,物理海洋學研究很早就開始引用衛星遙測資料作為觀測輔助,例如可以延伸船測或定點錨碇觀測資料作為解釋大範圍現象之參考依據。物理海洋學研究一般常用的衛星遙測資料項目主要有:(a)海面風場、(b)海面波浪、(c)海面高度、(d)海面溫度、以及(e)合成孔徑雷達(Synthetic Aperture Radar,SAR)海面回波訊號等,以下即依此順序陸續說明;至於各衛星所酬載感測器之量測原理詳情請參閱各衛星官網(網址列於下文)。
(a)海面風場:
全球廣大的洋面上除了在近岸陸棚區有少數氣象觀測浮標、氣象船或是在燈塔船上的氣象觀測外,過去有關海面風場資訊主要都是依賴在海上航行或作業船隻自行執行的氣象觀測報告。Hellerman
and Rosenstein
(1983)曾收集過去106年(1870-1976年)全球海洋船舶氣象觀測報告(共超過三千五百萬筆資料),但因資料點在水平空間上分佈甚不均勻(多集中於主要商業航線附近),他們所編篡之網格化的全球長期統計月平均海面風場經緯度解析度僅為2°
× 2°,至於另一組網格化的風場統計資料COADS (Comprehensive Ocean-Atmosphere Data Set,參見Woodruff et
al. 1987)雖然經緯度解析度可達1° × 1°,但仍避免不了資料分佈過於不均勻的問題。這些在美國太空總署(NASA)發展出快速散射儀(Quick Scatterometer,QuikSCAT)測風技術,且隨著散射儀人造衛星(QuickSCAT,如下圖)進入軌道觀測後即得以有效改進。衛星散射儀其實就是側視雷達(side
looking
Radar),是藉助海面散射體對衛星所發微波脈衝訊號之後向散射作用來量測,由於後向散射強度與海面風速大小以及風向有關,因此使用雷達天線以不同角度掃瞄衛星軌跡直下方兩側的海面便可量測出海面風速與風向。然而2009年11月23日QuickSCAT因天線卡住致使雷達散射儀無法作動,此後除2013年中曾有一陣短時間有作用外,QuickSCAT基本失效,但在失效前已有其它衛星接續工作。目前使用中的測風衛星為ASCAT (Advanced
Scatterometer),也是使用雷達散射儀觀測海面風場(使用6支側視天線),ASCAT是歐洲氣象衛星開發組織 EUMETSAT (European Organisation
for the Exploitation of Meteorological
Satellites)所發射的衛星。
[註:(1)
Hellerman, Sol, Mel Rosenstein (1983) Normal Monthly Wind Stress Over the World
Ocean with Error Estimates. J. Phys. Oceanogr., 13, 1093–1104. (2) Woodruff, S.
D., R. J. Slutz, R. L. Jenne, and P. M. Steurer (1987) A comprehensive
ocean–atmosphere data set. Bull. Amer. Meteor. Soc., 68, 1239–1250. ]
 |
美國NASA QuickSCAT衛星示意圖片,該衛星係1999年6月19日發射進入軌道,所裝載之SeaWinds散射儀每天持續量測全球海面風場並運作了超過十年以上的時間(2009年11月23日失效)。衛星下方之圓盤形物體即為Ku-band (13.4 GHz)之SeaWinds雷達散射儀的天線(摘自http://podaac.jpl.nasa.gov/QuikSCAT)。下圖為ASCAT衛星使用6支天線觀測作業示意圖(摘自EUMETSAT ASCAT)。
|
與全球其它海域相比,臺灣附近海面風場之船舶觀測資料在數量上應屬中等,但也有資料密度分佈不均勻,過於集中在商業航線附近的問題,因此如需要探討臺灣近海風場特性就不妨使用衛星風場資料[衛星風場資料(包括QuickSCAT及ASCAT)均可從下列網址下載 NASA Physical Oceanography Distributed Active Archive Center (進入後在左欄 parameter處選Ocean Winds)]。此外,QuikSCAT衛星風場的歷史觀測資料也可以從美國UCAR CISL Research Data Archive網站下載取得,共有從1999年7月至2009年7月長達十年之網格化海上風場數據;該資料係由美國國家環境預測中心(NCEP)將QuikSCAT遙測資料重新分析並再製成每六小時一筆並按經緯度0.5° × 0.5°網格建檔,使用頗為方便。
(b)海面波浪與(c)海面高度:這兩種資料都是由衛星所裝載之雷達高度計(Radar Altimeter)產出之結果,因此合在一起說明。衛星散射儀與雷達高度計都是雷達,二者最大的差異在於前者為側視,波束較寬,量測參數主要是海面後向散射訊號的強度變化;而後者則為下視,波束較窄,主要量測脈衝波發出後往返所需時間以及脈衝波波包遇到崎嶇海面反射後之變形情形,由脈衝波走時可定出海面與衛星的垂直距離(由於地面控制站可精確測知衛星的高度與位置,因此便可得出海面高度),另外脈衝波波包反射後之變形情形則與海面波浪大小有關,是以可以得出海面波高狀況。
 |
|

然而衛星高度計所量出的只是沿衛星軌道直下方海面高度與波浪狀況,雖然水平解析度很高,但必需自行做資料同化後才能網格化處理後使用,對大多數物理海洋研究人員而言大家往往只是衛星遙測資料的終端使用者(end user),不會、也沒有能力做到這一步,因此主要還是使用全球各地資料中心彙整、品管、同化及網格化後的產品;AVISO+ (Archiving, Validation and Interpretation of Satellites Oceanographic data)便是一個很重要的資料中心,AVISO+編輯、整理歐洲Jason-2衛星(如上圖)以及其它衛星運用雷達高度計所測(由2009年9月14日起)全球海面高度以及1° × 1°網格海上示性波高(significant wave height)與風速資料(每日一個檔案)。AVISO所提供之每日一個檔案的網格化指示波高資料係以Netcdf格式存檔,地理範圍為由南緯90度至北緯89度,東經0度至359度(如需以西經表示之經度值,則將360減去東經數值即可),總共有360×180個網格點資料。使用者除了可自行撰寫程式呼叫Netcdf程式庫以讀取分析此資料外,亦可使用AVISO+所提供之轉檔程式(可將Netcdf檔轉成ASCII格式)方便處理作業。
(d)海面溫度:任一個物體只要表面溫度大於絕對溫度零度便會對外輻射放出不同波段的能量,此現象稱為黑體輻射。海面黑體輻射所發出的輻射能量絕大部分是表現在長波波段,且紅外輻射的能量與海面溫度的4次方成正比,因此可以藉助量測紅外輻射能量而「遙測」海溫。 人造衛星使用輻射儀對全球海面溫度進行監測作業已有不下四十年的歷史,目前最常使用的是美國NOAA系列衛星,該系列衛星所載的是稱為AVHRR (Advanced Very High Resolution Radiometer,參閱AVHRR)的輻射儀,自1978年10月13日NOAA發射TIROS-N衛星,1979年6月27日NOAA-6衛星,以後約每隔2-3年NOAA即會發射下一編號的NOAA系列衛星,2009年2月6日NOAA-19發射升空,為此系列衛星中最後一顆。國內許多單位均設有NOAA衛星接收站(例如中央氣象局、漁業署水試所、臺灣海洋大學、中央大學等等)可以即時接收衛星海溫遙測資料並應用其日常作業,一般研究工作並不需使用即時資料,因此可至全球各地的資料中心下載延時資料(delayed data)使用,下表為一些常用及遙測資料的下載點網址,最後二列的OIsst以及Ghrsst均為品管網格化後的海面溫度資料。
 |
NOAA-19衛星示意圖 |
一些常用及遙測資料的下載點網址:
Argo data were collected and made freely available by the
International Argo Project and the national programs that contribute to
it. (http://www.argo.net).
Svps These
data were collected and made freely available by the Copernicus project and
the programs that contribute to it. (http://www.copernicus.eu).
Aviso products were produced by Ssalto/Duacs and distributed by Aviso, with support from Cnes (http://www.aviso.altimetry.fr/duacs/).
Chl-a Chlorophyll-a obtained by the merging of satellite observations.
Credits: E.U. Copernicus Marine Service Info. (http://marine.copernicus.eu/).
Cloud Himawari-8 Real-time Web is developed by the NICT Science Cloud
project in collaboration with JMA and CEReS. (http://himawari8.nict.go.jp)
OIsst data produced by Remote Sensing Systems and sponsored by NOPP and the NASA Physical Oceanography Program are available at
www.remss.com.
Ghrsst The Group of High
Resolution Sea Surface Temperature (GHRSST), Multi-scale Ultra-high
Resolution (MUR) data were obtained from the NASA eosdis PO.DAAC at the Jet
Propulsion Lab. (www.jpl.nasa.gov). .
(e)合成孔徑雷達(Synthetic Aperture Radar,SAR)海面回波訊號:
我們在前面談到船舶雷達時曾以Furono雷達6呎長天線為例,說明6呎長天線在水平方向上的波束寬度為θ=1.2度,換言之如果目標與雷達天線之距離為R=1 km,那麼在此距離處雷達之水平波束寬度(Rθ)即變為17.5m寬,因此若有兩個物體停在該距離且相隔很近(間距小於17.5m),那麼從雷達回波上就很難分辨出這會是兩個物體;加果想要增加雷達的側向解析能力那麼就需要將天線加長,例如8呎長天線之水平方向波束寬便可縮至0.95度,「雷達解析力與天線長度成正比」這種關係與「望遠鏡放大倍數與光學透鏡孔徑大小有關」的特性非常類似,因此一般雷達又稱為真實孔徑雷達(Real Aperture Radar,RAR),實務上RAR雷達天線並不可能無限加長,特別是如果雷達是要裝在諸如飛機或是人造衛星上,這些載具對於可酬載之重量與大小尺寸都有很大的限制,因此RAR雷達的解析能力也會受到限制。不過,如果載具移動速度很快,那麼就可以把載具快速通過一個小目標區上方時所發出的所有雷達訊號想像成是由一個很長的天線所發出的(當然沿此虛擬天線上不同位置的點波源會有一些時間延遲),透過類似前面談到WERA系統時所說的phased-array antenna以及beam forming過程的方式(只不過是反過來從回訊著手),如此將訊號拆解、重組、疊加後便相當於是使用了一個很長、由人為方式「合成」出的虛擬天線來測量,如此亦可得出解析度很高的雷達圖像,藉由這種方式而工作的雷達稱為合成孔徑雷達(Synthetic Aperture Radar,SAR)(如下左圖)。然而SAR的成像過程除了可以依上述,利用類似波束合成的觀念重組觀測訊號在時間域(time-domain)處理外,也可以在頻率域(frequency-domain)處理,後者則是運用都卜勒頻率效應;由於雷達波源在快速移動,因此順著衛星移動方向、在衛星直下點前方回波的頻率會變高,後方回波的頻率會變低,而在衛星直下點與軌道垂直方向上的回波則頻率不變,是以利用回波的走時以及頻率變化就可以將雷達回訊重新分解(如下右圖),求出網格化地面上每一網格對雷達回訊之貢獻量,然後將衛星(或飛機)通過目標區時所有這些已按地面不同位置分解好之資料再經由統計平均(藉以消除噪訊影響),最後便可得出高解析且低噪訊的地面回波訊息。
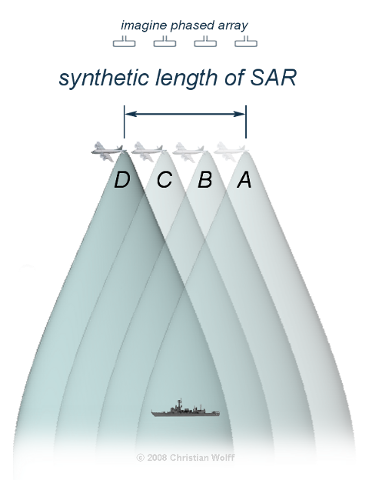 |
(左)合成孔徑雷達SAR作業示意圖(合成一個虛擬的陣列天線)。
(上)衛星軌道(往上移動)下方1200x1200km2地面上,等都卜勒頻移線(藍色)與等回波距離線(紅色)分布之示意圖(Isodops數值會隨雷達高度、飛行速度、雷達波長不同而異)。(摘自Space-Based Bistatic GPS Radar Orbit Analysis) |
SAR的成像觀念聽來確實不難,但是要實現做出可用的實際裝置可就是另外一回事,一點也不簡單,尤其是將回波訊號拆解與重組需要涉及到大量的複雜計算,以往曾用光學方法處理,拜電子科技以及計算機科學的快速進展才使得當代合成孔徑雷達系統尺寸可以做得很小。1952年SAR即已問世,但一直是裝在飛機上航測使用,直到1978年SAR才隨SEASAT衛星發射上天進行對地球的觀測,雖然SAR系統在SEASAT衛星上只工作了106天,但已充份証明SAR具有不受天候及日夜影響的優點(使用微波波段不受雲雨影響,夜間亦可工作),這些成果引領了隨後衛星SAR相關技術的持續發展,也開展了更多層面的應用;SAR目前在海洋上的應用包括有:(1)監測海上油污(Oil Slicks),(2)量測海面風場,(3)量測海面波浪狀況,(4)呈現海下內波,(5)估算淺海海底地形,(6定出海洋鋒面位置,以及(7)船隻偵測與鑑別等。[參閱Kazuo Ouchi (2013) Recent Trend and Advance of Synthetic Aperture Radar with Selected Topics. Remote Sens. 2013, 5, 716-807; doi:10.3390/rs5020716 ]以下為一些例子。
SAR偵測海上油污:海面如果浮有一層油污,這層油污縱使很薄,也會在海面上構成很特殊的海面邊界層,會使波浪感受到摩擦力增加,此效應對於短波長的小波更是顯著,因此海面如有油污便會變得很平滑,是以觀察SAR影像對比可以推估海面是否有油污,但高風速與低風速時則不易分辨,另外油漬也有可能是生物造成並非人為的,但形狀均勻、綿延很長的平滑暗帶多與人為因素有關。
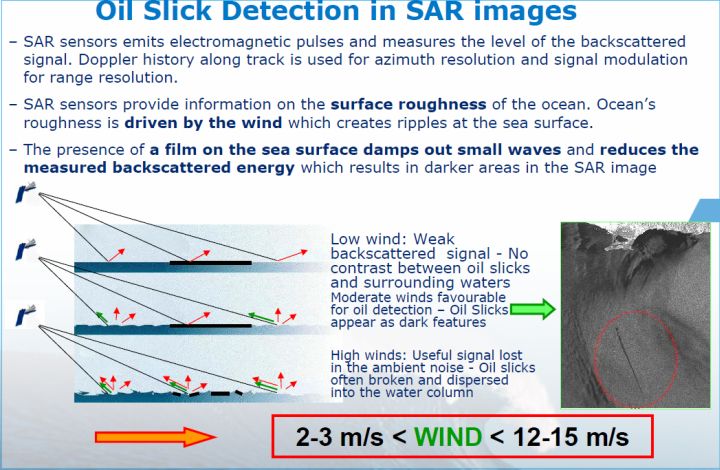
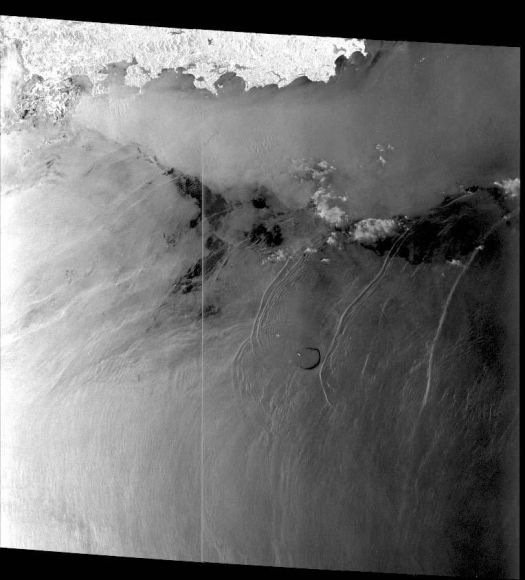
在中等風速海況下,使用人造衛星合成孔徑雷達(SAR)影像可以偵測海上油污(摘自Marin Chintoan-Uta, 2010, Operational use of satellite SAR at EMSA 25 January 2010 SEASAR Workshop – ESRIN, Frascati)
SAR觀測海下內波:SAR可以觀測到海面下內波的原理如下圖所示。
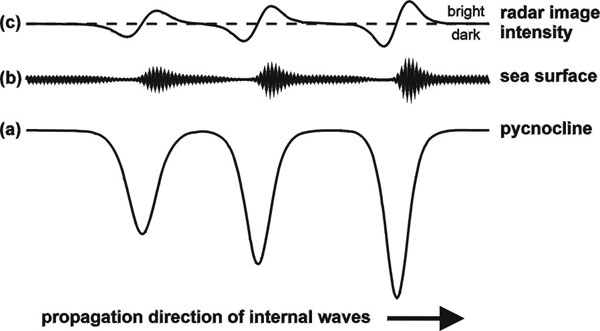 |
(左)水下有(圖為向右傳)非線性內波時,內波會導致海面產生水平水流匯合或是發散,由於波-流交互作用的關係,在水流匯合處海面小波波能會增大,因此海面變得崎嶇,但水流發散處則反之,海面小波波能變小,海面平滑,是以在SAR雷達回波影像上便會呈現明、暗式帶狀分布。(摘自ESA Earth online Oceanic Internal Waves) |
 |
加拿大RADARSAT衛星ScanSAR
圖像,顯示東沙島附近海下非線性內波波列 |
SAR船隻偵測:這就不多說也不解釋了,直接上圖(如下)。
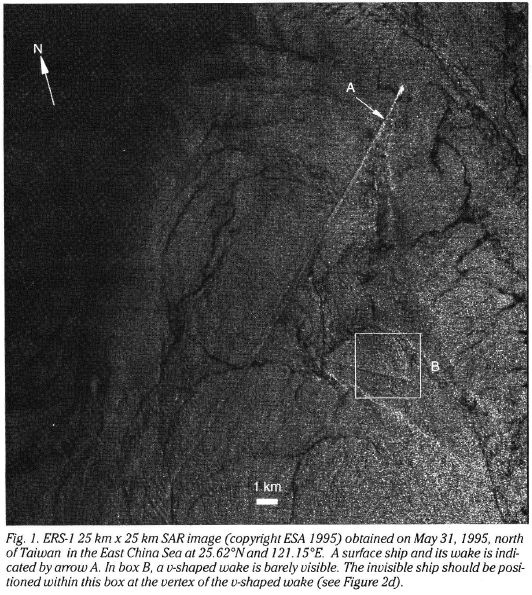 |
摘自A. K. Liu, C. Y. Peng, and Y.-S. Chang (1996) Mystery Ship Detected in SAR Image. EOS, Vol.77, No. 3, page 17. |
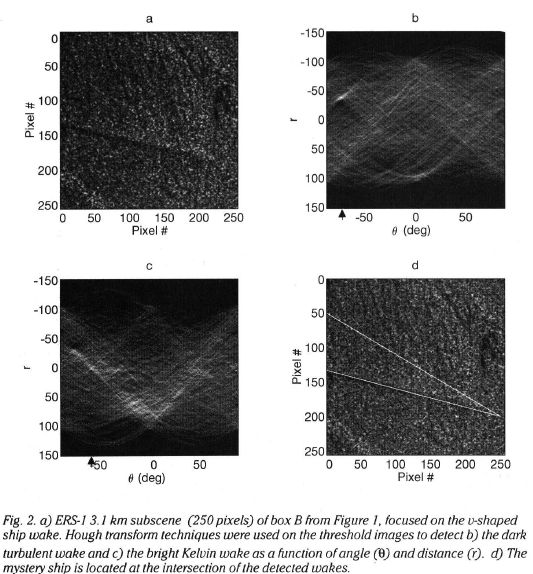 |
(d)有尾跡但海面上看不到船身,請問這是什麼「船」? 摘自A. K. Liu, C. Y. Peng, and Y.-S. Chang (1996) Mystery Ship Detected in SAR Image. EOS, Vol.77, No. 3, page 17. |
![]()
 |
 |
本章始建於1998/9/17, major revision: 2017/4/9