
三、早期使用的一些觀測儀器與裝備
這一節包括四個小節,分別是(一)溫、鹽剖面量測以及水樣採集,(二)海流測量儀器,(三)波浪觀測儀器,以及(四)潮汐測量方法。各小節主要是記述一些早期使用過的裝備(當然有些至今仍在沿用),比較近代出現的儀器裝備以及一些遙測工具則放在第四節介紹。
(一)溫、鹽剖面量測以及水樣採集
CTD、BT、XBT、顛倒溫度計...、採水器等:CTD (Conductivity-Temperature-Depth,溫鹽深儀)可能是海研一號上使用最頻繁的水下探測裝備,也是近代所有研究船上必備的儀器,早在1970年代CTD即已問世,近四十年來改變不多,主要的變化是壓力探針量測更為精準,應用幫浦抽水以避免因CTD下放或上收速率不穩定對探針反應速度的影響,同時水下主體可以附加各種不同型式的電子探針等,關於CTD我們將留待本章第四節再行敘述。

![]() 早期(陽明艦以及九連號時代)使用過量測海水溫度垂直剖面的裝備 - BT (Bathythermography),又稱為機械式BT
(Mechanical BT)[上圖摘自Neumann, G. and Pierson, W.J., Jr. (1966) "Principles of Physical
Oceanography"]。BT是1935年由Carl-Gustaf Rossby (Rossby
wave就是以他的姓來命名的)最先開發的,後來二次大戰時美國海軍廣用於反潛作業。其原理是應用水壓推動活塞使記錄裝置(即上圖下方所示以煙薰黑的玻璃片)產生縱向移動(玻璃片深度方向),再利用熱敏金屬線之冷縮熱脹推動尖針產生橫向移動(玻璃片溫度刻度方向),如此即可在玻璃片上刻劃出溫度隨水深變化之情形。
早期(陽明艦以及九連號時代)使用過量測海水溫度垂直剖面的裝備 - BT (Bathythermography),又稱為機械式BT
(Mechanical BT)[上圖摘自Neumann, G. and Pierson, W.J., Jr. (1966) "Principles of Physical
Oceanography"]。BT是1935年由Carl-Gustaf Rossby (Rossby
wave就是以他的姓來命名的)最先開發的,後來二次大戰時美國海軍廣用於反潛作業。其原理是應用水壓推動活塞使記錄裝置(即上圖下方所示以煙薰黑的玻璃片)產生縱向移動(玻璃片深度方向),再利用熱敏金屬線之冷縮熱脹推動尖針產生橫向移動(玻璃片溫度刻度方向),如此即可在玻璃片上刻劃出溫度隨水深變化之情形。
XBT (Expendable Bathythermograph)是1960年代美國海軍委託麻州Marion的Sippican Corporation開發以取代機械式BT的可棄式BT,後來這家公司也是全球唯一產製XBT的供應商。XBT組成如下圖所示;作業時船隻不需停俥,人員只需到船舷邊將XBT筒朝下方海面並將筒中央的釋放插梢(release pin)拔出,探頭便會掉入海中,入水後其自由落體下沈速度約為每秒鐘大約6公尺左右;XBT探頭內置有溫度探針,所量測到的溫度變化係以電子訊號方式經由細導線傳回船上接收裝置,將時間轉換為深度便可得出海水溫度垂直變化的剖面;XBT有多種型式,視型式不同探測深度可由200m至1860m。近代亦有功能加強型產品,係在探頭又加裝了導電度計,可以同步量測海水溫度與鹽度垂直變化的剖面,稱為XCTD。目前物理海洋界(例如SOOP計畫、海洋聲學現場實驗等)、地球物理震測作業(需作聲速修正)以及軍方水面船隻反潛、攻潛等作業仍不時會使用到XBT。(本段相關文字與圖摘自:Atlantic Oceanographic and Meteorological Laboratory (AOML), NOAA 網頁,以及Wikipedia Bathythermograph)
 |
 |
 |
|
 |
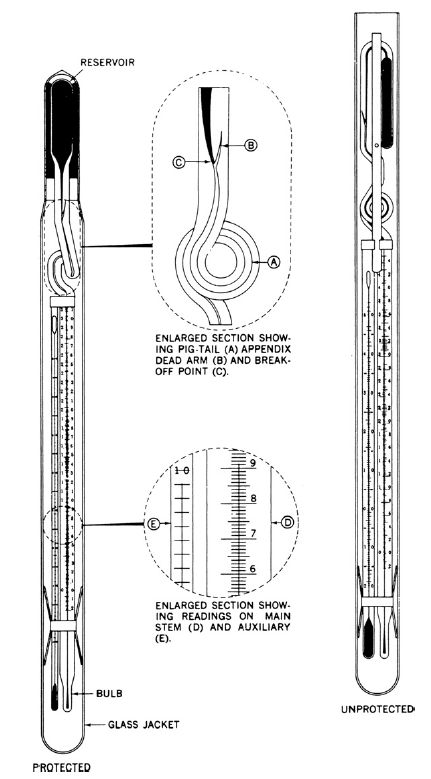
![]() 南森瓶上附裝之顛倒式溫度計(reversing
thermometers),左為防壓式(溫度計裝在可以抗壓的玻璃管中,溫度計不受外界壓力變化影響),右為受壓式(溫度計會受到外界壓力變化影響),注意溫度計內部之分叉,當溫度計顛倒時,水銀毛細作用會使水銀柱從分叉處斷裂,斷裂後落在溫度計下段之水銀體積與現場觀測到的溫度成正比,而受壓式與防壓式二者之溫度差則與壓力成正比,如此即可得出量測現場之水溫以及深度。
上圖摘自Neumann, G. and Pierson, W.J., Jr. (1966) "Principles of Physical
Oceanography"。顛倒式溫度計是1874年Negretti and Zambra (London)公司最早推出的(參見
The Oceans, Their Physics, Chemistry, and General Biology, pp348-352.)
南森瓶上附裝之顛倒式溫度計(reversing
thermometers),左為防壓式(溫度計裝在可以抗壓的玻璃管中,溫度計不受外界壓力變化影響),右為受壓式(溫度計會受到外界壓力變化影響),注意溫度計內部之分叉,當溫度計顛倒時,水銀毛細作用會使水銀柱從分叉處斷裂,斷裂後落在溫度計下段之水銀體積與現場觀測到的溫度成正比,而受壓式與防壓式二者之溫度差則與壓力成正比,如此即可得出量測現場之水溫以及深度。
上圖摘自Neumann, G. and Pierson, W.J., Jr. (1966) "Principles of Physical
Oceanography"。顛倒式溫度計是1874年Negretti and Zambra (London)公司最早推出的(參見
The Oceans, Their Physics, Chemistry, and General Biology, pp348-352.)
南森瓶(Nansen Bottle)─19世紀挪威探險家南森所發明,一直沿用至今,但目前比較常使用的採水樣工具則是被Niskin Bottle以及 Go-Flo Bottle等採水瓶所取代,後二者搭配CTD與輪盤式採水器(Rossete Sampler,見後)使用可以大幅增進水樣採取工作效率以及取樣深度之精準性以及機動選擇性。
 |
|

 |
 |
![]()
![]() 左圖為南森瓶下放前,右圖則為上收後,注意瓶子的方向(右方為已顛倒)
左圖為南森瓶下放前,右圖則為上收後,注意瓶子的方向(右方為已顛倒)
以及訊錘的位置(左圖下方之訊錘已脫離,右圖上方多了訊錘)。
 |
 |
 |
| |
 |

![]() 作業人員(海研一號前探測技佐祝樹基)展示單獨使用Niskin Bottle採水之情形。
作業人員(海研一號前探測技佐祝樹基)展示單獨使用Niskin Bottle採水之情形。

 |
 |
 |
![]() (左)海研一號上Sea-Bird CTD與輪盤式採水器(Rosette sampler)組合。照片上所示之採水瓶有兩種,
(左)海研一號上Sea-Bird CTD與輪盤式採水器(Rosette sampler)組合。照片上所示之採水瓶有兩種,
其中附有圓形轉輪者為Go-Flo Bottle,另一種則為Niskin Bottle。
(右)Sea-Bird
CTD直立安裝於輪盤式採水器之配置示意圖(摘自SeaBird公司
SBE 911plus)。
|
輪盤式採水器水下主體為一圓筒形鋁質構架,構架上方中心之圓盤正中為一圓筒,內部裝有控制電路;不同型之輪盤式採水器可安裝12至36個採水瓶,採水瓶的容量則可從最小尺寸的1.2 L到最大的30L;採水作業前需先將所有採水瓶的瓶蓋打開(Go-Flo瓶因設計不同需先關上,下水後壓力閥作動會將瓶蓋自動打開),並將各瓶之開關控制繩扣扣入卡筍,一般都是在CTD上升作業時採水(如果在下放過程中採水,在淺水層採水時瓶中有可能會捲入許多氣泡,到更深水層後因水壓過大有時會導致採水瓶破裂),輪盤式採水器的船上控制器(deck unit)設有作動開關按紐,每按一次(亦或在CTD控制電腦螢幕上點選發出採水指令),輪盤式採水器水下部份之控制電路便會依順序打開一個卡筍,使繩扣彈開,於是該號採水瓶便自動關上閥門,而將該深度的海水水樣密封於瓶中。(左圖摘自 Wikipedia Rosette Sampler)
|

(二)、海流測量儀器
海流流速之計量單位在mgs制下為m/s,但我們也常會聽到「船速XX節」或「流速XX節」這樣的說法,那麼「節」(Knots) 到底是什麼?當然教科書上會說一節就是每小時一海浬的意思,或1 knots (簡寫為kts) = 0.5144 m/s,「節」這個名辭則是由英文「Knots」翻譯而來。然而就字面來看,Knots應是「繩結」的意思,但「繩結」又怎麼會和「流速」聯結起來了呢?
話說17世紀帆船時代,海員們量測船速是使用一種稱為「扇板測程儀 (common log)」的裝置(15世紀葡萄牙人Bartolomeu Crescencio所發明,參見http://historicalfindings.weebly.com,又有一說是15世紀時荷蘭人最先使用的,參見Knots and the Nautical Mile),這個裝置其實就是用長繩栓著一片扇形的「木板」(log),長繩上則每隔一段固定長度(約50英呎)就繫上一個繩結,要測船速時海員在船艉先將木板放入水中,讓木板被船拉著在船後漂浮,等沙漏開始計時便放鬆繩子,由於船與木板有相對速度,二者的距離會越來越遠,等沙漏漏完(約半分鐘)海員只要數一數放出去的繩子上共有多少個「結」便是船速多少「節」(50 英呎/0.5分鐘 = 15.24m/30 sec = 0.508 m/s ~ 1 kts),下圖動畫(引自NOAA Ocean Service Education 網頁)很生動地描繪了此量測過程。
 |
  |
流速的定義是指「流體質點單位時間內所走的行程(距離)」,但數學上要如何才能表現流體運動呢?流體力學教科書在談到流速測量時往往都會提到兩個人名:Lagrange以及Euler,這兩位都是18世紀的數學家(見下圖),他們分別提出兩種以數學式描述流體運動的方法(這兩種方法的觀點雖然全然不同,但結果卻又殊途同歸)。Lagrange的觀點是從流體質點著手,也就是追蹤流體質點的運動狀況(速度、軌跡、以及其它特性等),如果能了解到流場中每一個質點的個別狀況,那麼就能完全掌握到整個流場的變化。至於Euler則是從空間座標著手,也就是將流體質點的運動狀況視為空間與時間的函數,如果能了解到時、空座標中每一點的狀況,那麼當然也就能掌握到整個流場的變化。由於空間座標中的「點」以及流體質點的「點」都被視為體積無限小,而同一時間每一個流體「點」只能佔據一個空間「點」,因此這兩種不同描述法實質上是殊途同歸,彼此所描述的流場也是可以一對一相互轉換的。轉換的關鍵就在於「同一時間一個流體點只能佔據一個空間點」,是以就該「點」而言,兩種描述法所描述的都是同一個流體質點,因此該質點的所有特性不論使用哪種描述法來表示其結果都應該是一致的。今日我們將在空間中固定點所做的流速觀測稱為Eulerian觀測 (Eulerian measurement),而跟隨浮標(觀測其位置隨時間之變化)量測其軌跡(浮標追蹤)以及其行徑中水體特性變化之觀測法則稱為Lagrangian觀測(Lagrangian measurement)。
 |
 |
|
| Joseph Louis Lagrange (1736-1813) | Leonhard Euler (1707-1783) |
還記得在第一章內我們曾談過「1842年,美國海軍上尉兼海洋學家莫銳(Matthew Fontaine Maury)因殘廢而終生服務於海圖及測量儀器之保管工作,他利用閒暇研究成千累萬之航海日誌,將海洋中之風與流的觀測資料整理成海流圖,...」(如下圖),這種根據船隻漂移記錄而推估海流的方法便是一種Lagrangian觀測,可見海流量測至少也有近兩百年歷史,這麼多年來所用的儀器型式種類繁多,我們無法一一詳述,以下就將各種海流量測儀器按其量測原理大致分成「機械式」以及「感應式」兩大類,並從各類中分別挑選一些裝置為例簡述,另外也簡介一下海流計錨碇系統之佈放與回收之實務作法。
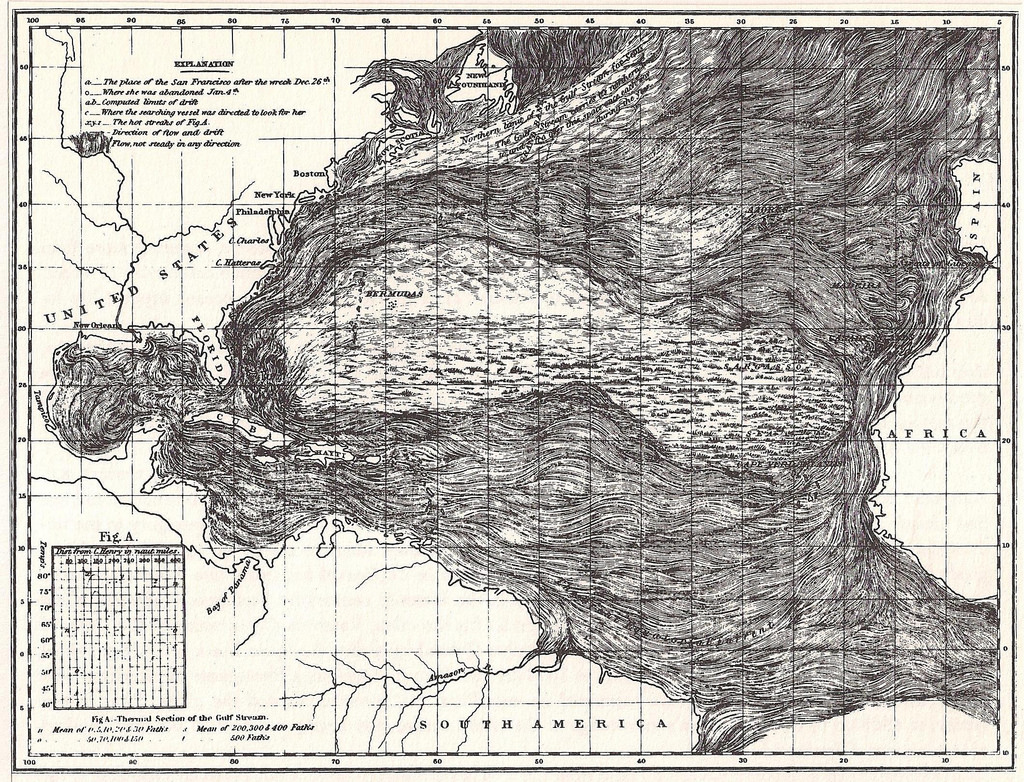
Maury1855年「The Physical Geography of the Sea」書中插圖,顯示由船舶航海報告中所推衍出的海流流線(摘自jeannine at Indulgy)。
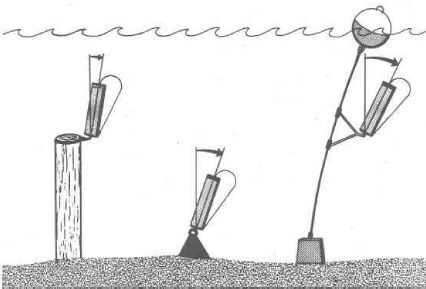
(甲)機械式﹕「漂浮在水面或水中的物體,如果與水體間有相對運動速度,那麼水體便會對物體產生拖曳力,拖曳力之大小與二者相對流速之平方成正比」,因此在理想無風無浪的平靜淺水海灣中,只要有艘小船筏、有個羅盤、有個如下左圖的擋流板,那麼就一樣可以做出品質不差的海流觀測,這種「窮人的海流計」稱為CBI 擋流板(Chesapeake Bay Institute Drag)式海流計,作業時測量者只需在小筏船頭下錨,水流會自然調整小筏船頭使其面對流向(如果船身左右對稱很好,只有順著流向水流受到的阻力才會最小),因此用羅盤定出船頭方位便可得出水流的來向,另外在船尾放下擋流板,擋流板上方的連接繩與垂直方向之傾斜角即與流速大小成正比,測量者只要坐在船尾隔一段時間記錄一下船頭方位以及擋流板傾角就好。至於擋流板傾角與流速之間的關係則需要事先校正率定,作法也很簡單,如果是「有錢人」那可以去找個能做船模實驗、有平台拖車的水槽(tow tank),用拖車以不同速度吊著擋流板跑個幾遍,便能得出精準的率定公式;可是咱們「窮人家」怎麼辦?不難,就去找一座下方有水流且足夠深而流水又均勻的小橋(例如一些大圳),在橋旁河圳邊先標定好距離(例如十公尺),這樣就可以藉碼錶以及漂紙片或木片方式來量出水流流速(這就是Lagrangian方式測流),當然咱們也可以仿照帆船時代的海員,自己做一個扇板測程儀的類似品,在橋孔上量水流速度,與此同時也在橋孔上放擋流板到水中,再去量擋流板的傾角,只要有夠多的不同流速點一樣也可以得出合理可信的校正換算公式。當然海洋研究沒這麼「窮」,還不需要用這麼克難的方式來作業。
1970年代開始出現以磁帶方式記錄資料之自記式海流計,這時代的海流計主要是用兩種方式來量測流速大小,一種是採用Savonius Rotor方式(見下圖b,例如AMF公司的VACM、Aanderaa公司的RCM4/5等均使用此方式),另一種則是採用Impellar槳葉方式(例如美國Edgerton, Germeshausen and Grier公司產製之 VMCM以及英國NBA公司的DNC等等均是),前者是根據水車原理,也就是水流的拖曳力會推動轉子旋轉,在最理想的情形下轉子迴轉一圈的圓周長度便約等於水流在轉子迴轉一圈的時間內所流動的行程,因此由單位時間內轉子迴轉的次數乘以周長便可算出流速;至於後者則是依據風車原理-「風車的轉速與風速大小成正比」,是以也可由轉速反推流速。至於那個時代的Lagrangian觀測法,不外使用漂流卡、漂流瓶、浮標追蹤等等,由於浮體是受水流拖曳力推動而「隨波逐流」,因此我們也將其歸類於機械式。以下將挑選一些例子一一道來。

二種簡單的測流原理,(a)圖為CBI 擋流板式(Chesapeake Bay Institute Drag),
(b)圖則為Savonius轉子(Rotor)方式,Aanderaa RCM海流儀即為後者方式。
(摘自 Pickard and Emery (1982) "Descriptive Physical Oceanography", 4th ed.)
 |
|
|
「影片流速儀」主體圓筒底部放置了一個能保持水平的球形羅盤(上圖中),羅盤球上有經度與緯度刻度,而球羅盤旁還固定擺了一支有日期顯示的石英手錶,另外在海流計圓筒頂部則放置了一支小型8mm底片攝影機,每當預設的觀測時間到時便會自動開燈拍一張,拍完關燈。儀器回收後將底片取出沖洗,然後再以人工方式一張張讀出影片上的記錄(時間、方位以及傾角,即影片正中央羅盤球上的經度與緯度刻度(如下圖),以及將傾角再經公式轉換為流速數值。在沒有電子化之前的時代,處理這種觀測資料是很花人力的工作。
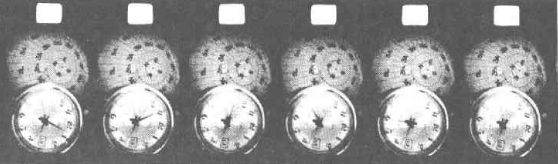
(以上四圖均摘自General Oceanics, Inc., Film Recording Current Meter Data Sheet, 1972
Sept.)
 |
以浮體傾斜方式製作測流裝置成本相對非常低廉,近海海流調查作業,如果需要同步佈放大量的海流觀測儀器而且經費又不多時,就很適合使用。時至今日,仍有人採用這種方法來觀測海流,只不過是使用數位羅盤以及傾角IC等來量測流向與流速,同時記錄方式也已全面電子化;另外,為節省成本起見,儀器造型簡化為只保留長圓筒(可使用坊間現成的PVC管材製作)形,左圖摘自eMOLT
Phase VI: Bottom Currents, NEFSC
NOAA,顯示以此種裝置採底碇方式測近底層海流的示意圖,圖中傾角a即與流速大小成正比;NEFSC稱此種裝置為傾角流速計(tilt
current meter),他們估計單支的製作成本約為USD $69。 |
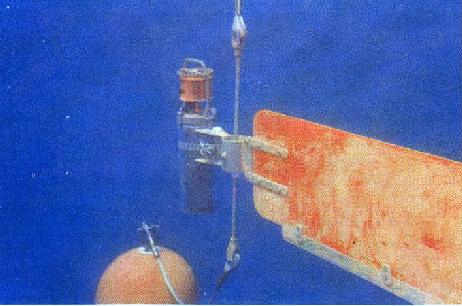
(1)轉子式:如Aanderaa Instruments公司的RCM4/5,RCM7/8以及AMF Inc.的VACM等等。
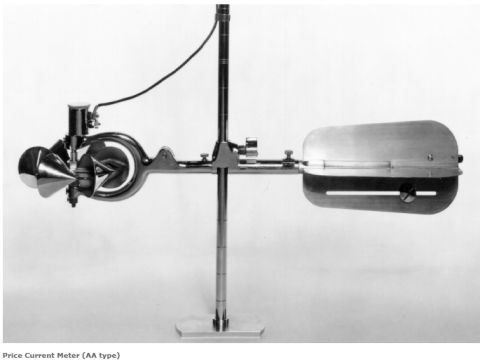 |
1885年美國工程師W. G. Price設計了一型以風杯方式測流的流速計(如左圖),並且申請了專利,下圖為其轉杯部份之放大(共6個轉杯),這或許是歷史上的第一台轉子式流速計(以上圖文均摘自T. G. Masaryk Water Research Institute Current Meters)。
|

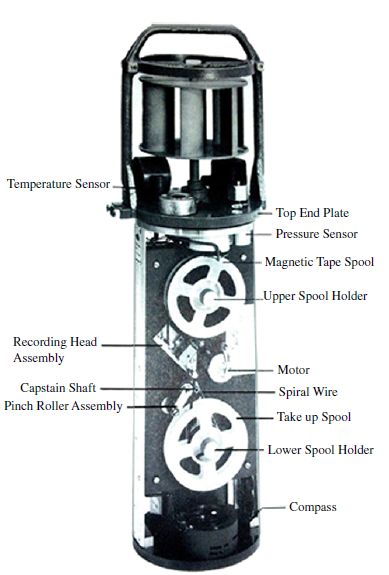 |
Aanderaa公司RCM4/5海流計內部構造。 |
 |
 |
左圖為Aanderaa公司RCM4/5流速計所用之Savonius 轉子,但更新之RCM7/8則使用如右圖所示之水車型轉子,為了確保水車型轉子僅能單向轉動,RCM7/8在轉子旁另加裝了半圓形的擋流圈(比較下列二圖中RCM7與RCM4即可看出差異)。(摘自Aanderaa Instruments RCM4/5, RCM7/8 manual) |
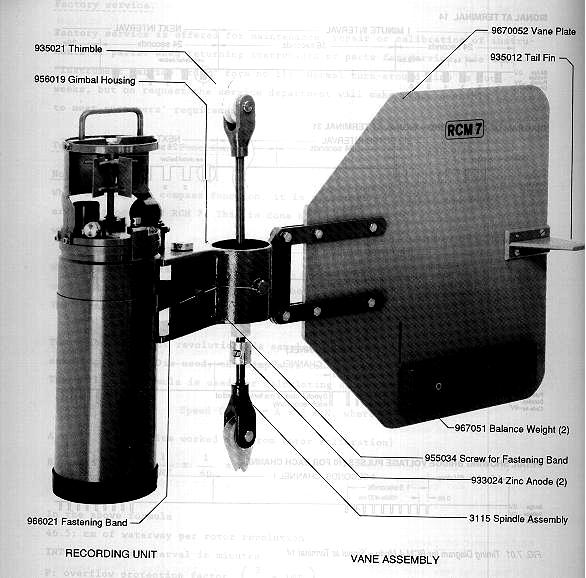
![]() Aanderaa RCM7 自記海流儀(記錄方式採用EPROM,可擦除可規劃式唯讀記憶體),注意轉子後方有半圓形的擋流圈。
Aanderaa RCM7 自記海流儀(記錄方式採用EPROM,可擦除可規劃式唯讀記憶體),注意轉子後方有半圓形的擋流圈。
摘自Aanderaa Instruments (1992)
"RCM7/8 Operating Manual"。
 |
|
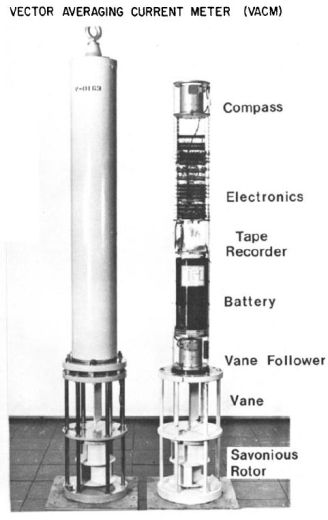 |
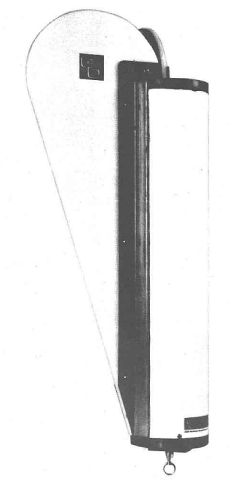
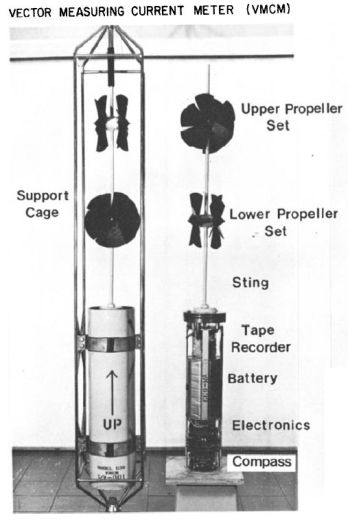
美國AMF公司(American Machine and Foundry Inc.)產製之VACM (Vector Averaging Current Meter)流速計也是採用Savonious轉子式設計(見左圖儀器下端),流向則是使用小型翼板(左圖Vane)。左圖係引自R. C. Beardsley 1987: A comparison of the vector-averaging current meter and new Edgerton, Germeshausen, and Grier, Inc., vector-measuring current meter on a surface mooring in Coastal Ocean Dynamics Experiment 1, JGR, 92, C2, 1845–1859。 |
(2)槳葉式:如百年前的Ekman海流計、英國NBA公司的DNC-2,美國Edgerton, Germeshausen and Grier公司的VMCM等等...
 |
槳葉式流速計的發展歷史 1787年R. Woltmann設計、製造了人類歷史上第一台機械式流速計(如左圖),Woltmann 流速計採用風扇式葉片,葉片轉數經由螺桿帶動計數齒輪記錄;1820年則將葉片改進為螺槳式,後來瑞士Prague技術大學的R. A. Harlacher教授又改善將葉片轉數轉成電子訊號計數(以上圖文均摘自T. G. Masaryk Water Research Institute Current Meters)。
|
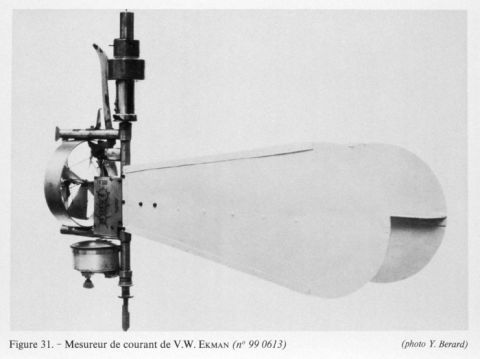 |
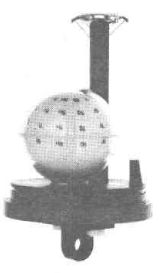
1903年瑞典海洋學家Vagn Walfrid Ekman (沒錯,就是第六章Ekman螺旋的那位Ekman)所設計的海流計(稱為Ekman海流計,如左圖,摘自Wikipedia Ekamn Current Meter)就是採用螺槳來感應海流。Ekman海流計是純機械式的設計,下水前有一個卡筍會將螺槳卡住不動,當下放到所需的深度後,從船上順著鋼纜打一個訊錘下去,訊錘會將卡筍打開,於是螺槳開始旋轉並帶動一個齒輪組,齒輪組又帶動指針以顯示螺槳的轉數,至於流向則是使用小金屬珠來計數,在儀器下方有一個內部等分為36個扇形區塊的圓形羅盤盒(見下圖),螺槳每轉100轉便會落下一個金屬珠,隨尾舵擺動不同方位金屬珠便會落入圓形羅盤上的不同區格內。當觀測時間到,再從船上順著鋼纜打另一個訊錘下去,這第二個訊錘會讓卡筍再次將螺槳卡住不動,上收後便可根據齒輪組上的計數以及羅盤盒內的金屬珠數算出流速與流向。 |
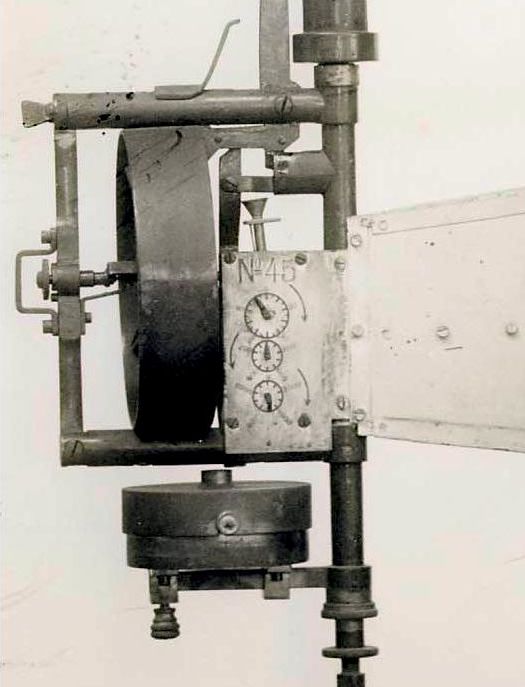 |
(左)Ekman海流計指針以及羅盤盒局部放大照片(摘自UC SanDiego Digital Collections)。(下)羅盤盒內部分隔構造(摘自W.S.Von ArX, 1962: An introduction to physical oceanography, Fig.8.3)
|

 |
(左)NBA DNC-3直讀式海流儀示意圖,注意海流儀水下主體左端之三葉螺槳葉片即為測流裝置。國內各界在1980年代前後期仍使用這類型的海流儀(DNC-2與DNC-3二者形狀類似,但DNC-2為內部卡式磁帶自記),後來逐漸被ADP與ADCP等海流儀所取代(摘自「范光龍 1991: 廢五金對鄰近海域生態環境及生物資源的影響研究: 二、海流對二仁溪附近海域環境的影響 ,農委會漁業特刊第23號,13-22」)。 (下,左與中)NBA DNC-2自記式海流儀(「九連號」前二副孫漢宗先生提供),此為1985年在中國石油公司海域鑽井船「丹武士」號上回收海流儀時所攝;(下,右)NBA DNC-2內部照片,DNC-2是使用數位卡式磁帶(Digital Cassette)記錄觀測資料(圖中即是),所用的數位卡帶記錄器為Memodyne data logger,每捲卡帶最大容量約為300K bytes,以現在眼光來看此容量當然是太小了,不過在1970-1980年代這可是當年最先進的記錄裝置,許多海洋儀器均採用這種記錄器。 |
 |
 |
 |
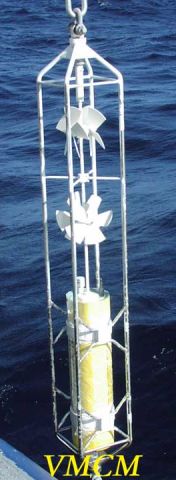 |
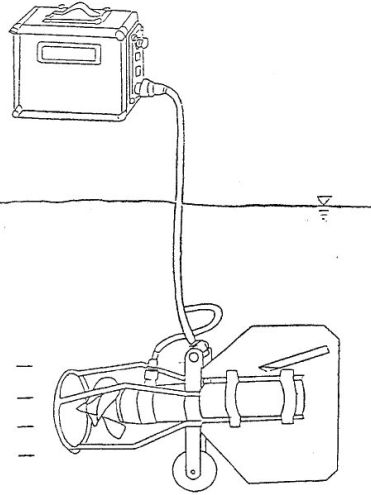
美國Edgerton,
Germeshausen, and Grier公司產製之VMCM
(Vector Measuring Current
Meter)流速計是採用兩組相互垂直Impeller槳葉設計。 |
|
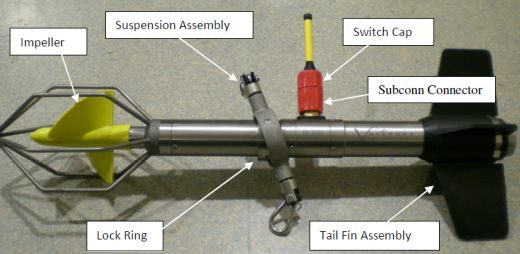 |
時至今日仍然有廠商產製Impeller螺槳式海流儀,例如英國Valeport公司之Model-106海流儀(如左圖),由於電子科技以及材料的進步,現代的海流儀不論尺寸與重量與1980年代相比均已大幅縮小,且效能(如電力持久性、資料儲存容量、取樣速率、資料下載速度等等)更強。 其主規格為,Sensors Speed Type: High Impact Styrene Impeller, Size: 125mm diameter by 270mm pitch, Range: 0.03 to 5m/s, Accuracy: ±1.5% of reading above 0.15m/s ±0.004m/s below 0.15m/s, Direction Type: Flux gate compass, Range: 0 to 360°, Accuracy: ± 2.5°,Resolution: 0.5° ,Temperature Type: Thermistor, Range: -5 to 35°C,Accuracy: ± 0.2°C Resolution: 0.01°C, Pressure Type: Strain Gauge,Transducer Range: 50, 100, 200 or 500 dBar, Accuracy: ± 0.2% Range,Resolution: 0.025% 。 (摘自 Valeport Model 106 Lightweight Current Meter datasheet) |
(3)Lagrangian觀測:
我們在前面的小節說過,站在橋孔上可以藉由漂紙片、木片或是用類似扇板測程儀的裝置等等不同方式來量測橋孔下水流速度,這些量法都屬於Lagrangian觀測,以下簡述海洋學歷史上關於Lagrangian觀測的一些作法。
|

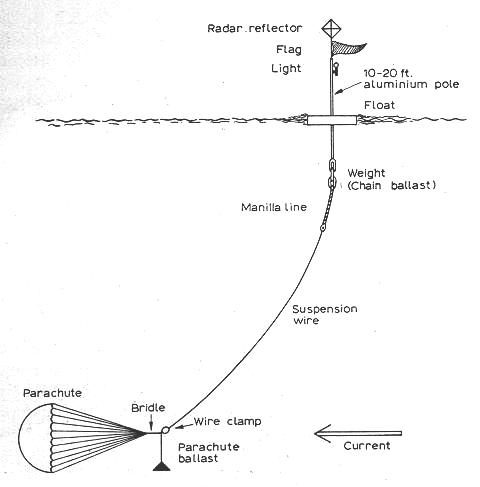 |
Lagrangian式海流觀測由於不需使用什麼昂貴的自記海流儀,除人力需求外其它成本相對低廉,縱使時代雖然不斷在進步,但這種方法卻一直被廣泛使用並無大變化。在1970年代之前,除了出現SWALLOW潛標與SOFAR潛標(參見第三章第七節)等用以量測深海海流的新發展外,淺層及表層浮標在定位方面仍然沿用地文航海的定位工具(如六分儀、雷達、羅遠-C;近岸作業使用岸置經緯儀等),而浮標之基本設計、量測方法與百年前的HMS Challenger時代相比並沒什麼大進步。 左圖(摘自Neumann (1972) "Ocean Currents")為1960年代利用拖傘(也是一種海錨;早期商船救生艇多放置此物,其作用是大風浪時救生艇上人員可將海錨放入海中,海錨在海中會圈住一大團海水隨小艇一齊隨波搖晃,這樣相當於增加了小艇的質量,因此可以減少小艇的顛簸程度,原因在於F=ma,若力不變,質量大者加速度小)方式製作漂流浮標測流之示意圖。 |
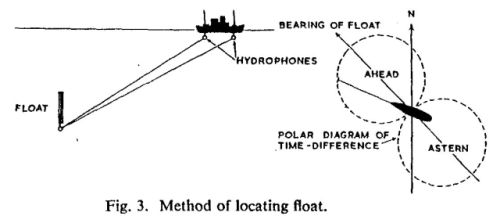 |
SWALLOW float 1955年英國物理學者John Swallow(當時才31歲,為劍橋大學博士生)以建築用鋁管以及簡單電子器材製做了中性浮力的水下聲學潛標(會在水下連續發聲),可以在船上藉助水下聽音器為潛標定位而量測深層海流(如左圖,摘自The evolution of the Swallow float to today's RAFOS float),關於Swallow float以及SOFAR float的發展歷史除上述網頁外尚可參閱From Swallow floats to Argo (University of California San Diego)這篇文章。 水下聲學潛標為大洋深層海流研究開創了新局,釐清許多觀點。 |
 |
SWALLOW float 由船上下放Swallow float (原圖引自Dave Hebert, Mark Prater and Tom Rossby, Graduate School of Oceanography University of Rhode Island, Deployment of an Isopycnal Swallow Float ) |
 |
SOFAR float 在Swallow發展水下聲學潛標的同時期,美國Woodshole海洋研究所的物理海洋學家Henry Stommel也在1949年以及1955年提出了藉由在SOFAR聲道中施放中性浮力浮標以追蹤深層海水循環路徑的構想。但直到1965-1966年期間才做出第一具可以放到SOFAR聲道深度的中性浮力潛標,1966年美國羅德島大學的Tom Rossby教授加入研究團隊後又修改設計,1968年第一具長距型SWALLOW潛標(後稱為SOFAR潛標)成功下水測試,藉助分設在巴哈馬、波多黎各以及百慕達等三處的水下聽音站為潛標定位,實驗結果証實訊號水平傳送距離可達846公里,但前二具潛標水下存活期均不長(僅分別為一週與兩天),直到將纜線強化後第三具潛標存活期便拉長到4個月。左圖為1973年Mid-Ocean Dynamics Experiment 計畫航前作業正將SOFAR float吊放上研究船。(以上圖文均摘錄自 The evolution of the Swallow float to today's RAFOS float,Graduate School of Oceanography University of Rhode Island ) |
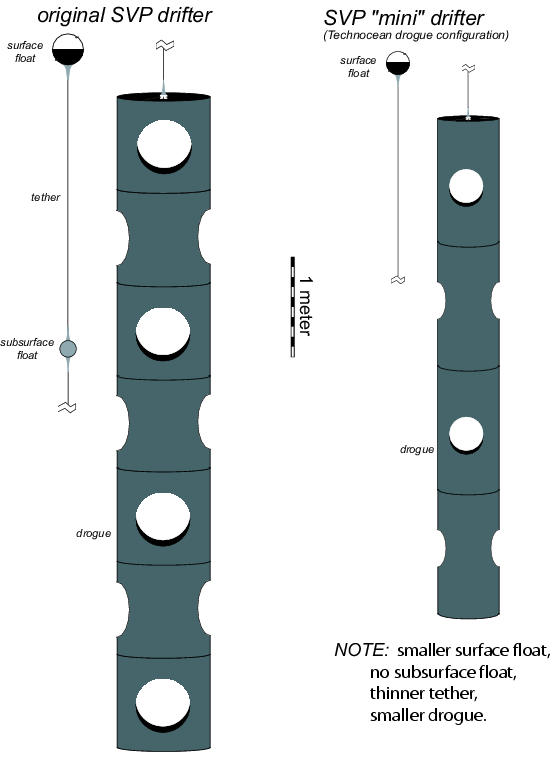
1970年代隨著人造衛星定位技術逐漸成熟,海面以及海洋淺層Lagrangian觀測浮標也跟上潮流而有躍進式的開展。皁在1975年North Pacific Experiment (NORPAX)就使用了用人造衛星定位的浮標來量測海流(使用9m直徑的拖傘放在30m深處),隨後也有許多大洋的觀測實驗使用以人造衛星定位的浮標。1982年World Climate Research Program 認知到在全球海洋佈放Lagrangian觀測浮標陣列對海洋以及氣候研究的助益將是極端珍貴的,但此想法的可行性仍取決於是否能生產出一種低成本、夠輕又容易操作的標準化浮標。隨後在Tropical Ocean Global Atmosphere (TOGA)實驗(1979,1988,1995-1994)以及World Ocean Circulation Experiment (WOCE, 1990-1998))等大型國際合作計畫項下均有使用漂流浮標量測表層海流的子計畫,這些子計畫在美國海軍海軍研究署(Office of Naval Research)、美國海洋與大氣總署(National Oceanic and Atmospheric Administration, NOAA)以及美國國家科學基金(National Science Foundation)等支助下由(1979至1992年)逐漸發展出一種共用型式的表層漂流浮標(稱為SVP drifter,如下圖;SVP為1979年開始之Surface Velocity Program的簡稱,現在則將他們所發展出的浮標稱為SVP浮標),並於1992年完成了太平洋以及北大西洋,1994年南大洋與印度洋,以及2004年南大西洋與熱帶海域的SVP浮標陣列,自此全球海洋中均完成了SVP浮標佈放(以上摘自Rick Lumpkin and Mayra Pazos, 2005, Measuring surface currents with Surface Velocity Program drifters: the instrument, its data, and some recent results)。
 |
SVP drifter (摘自Centre de Météorologie Marine) |
 |
SVP浮標展開實物照片 |
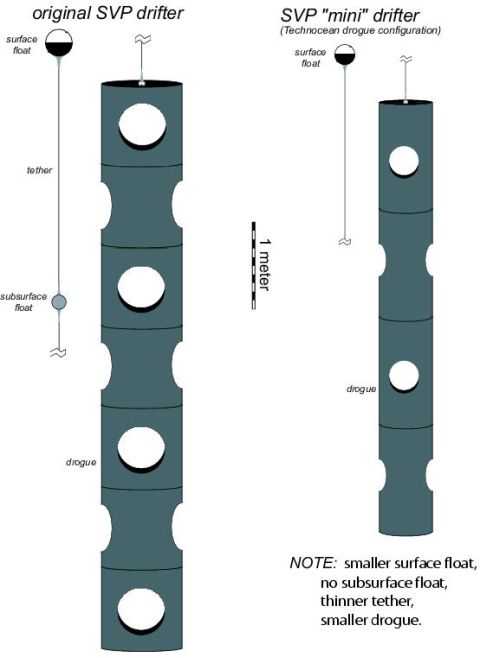 |
SVP浮標也有「迷你」型(如左圖右), (摘自NOAA AMOL, The Global Drifter Program 以及Luca Centurioni 2016 Surface Current Observations with Satellite‐Tracked Drifting Buoys) |
SVP計畫現改稱為Global Drifter Program (GDP),NOAA會將最新的觀測資料公布於網頁:www.aoml.noaa.gov/phod/dac/gdp_maps.php (如上圖所示為2017年3月20日所有SVP浮標位置分布,紅色點為只有安裝海表溫度計的浮標、藍色點為多加裝了氣壓計的浮標,綠色點則為還加裝了鹽度探針的浮標)。
(乙)感應式﹕機械式自記海流計(不論是使用轉子或是螺槳葉片)由於具有會轉動的元件,而元件轉動便有轉動慣量,如果海流本身在快速變動,這些轉動元件則會因具有轉動慣量而遲滯對流況變化的立即反應,甚至在很低流速時轉子或是螺槳葉片有時還根本無法起動(受到轉軸摩擦力影響),加以海中生物附著更會強化遲滯效應而更影響到轉動元件的作動效率,因此無轉動元件的海流計便有很大的市場空間。我們在一般海洋現場調查中常用到的感應式海流計如按原理來區分,不外(1)電磁式海流儀以及(2)聲學式海流儀[又可再分為走時(travel time)式以及都卜勒效應式二類]這兩種,至於在小尺度現象研究方面,則可能會用到一些諸如Hot-wire anemometer, Hot-film anemometer或是LDA (Laser Doppler Anemometer)、甚至PIV(Particle Image Velocimeter)等類型的流速計,這些反應快速的特殊用途流速計多用於流體力學水槽實驗,海洋現場調查尚未見普及使用,本小節將僅簡介前兩種,如對後述特殊用途流速計有興趣者可參看Fluid Flow Instrumentation,以及Wikipedia Flow measurement等網路資料。
|
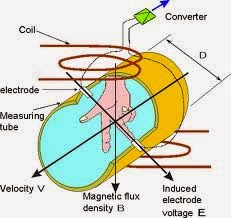
(1)電磁式海流儀,電磁式海流儀之工作原理與右圖所示(摘自TN Instrumentation, Introduction to Magnetic Flow Meters)之工業用裝置雷同,但設計上則是將激磁線圈裝在海流儀探頭內部;激磁後磁力線會由探頭上方射出、向外迴轉、垂直向下繞經探頭四周外側、再從探頭下方返回,海流的水平流速分量正向切割探頭外側垂直向的磁力線便會在垂直海流流向的側方向上產生電位差,是以使用兩組相互垂直水平排列的電極量測電位差偽即可換算得出水平流速向量。電磁式海流儀探頭形狀有多種造型,以下為一些實物事例。 |
 |
 |
  |
|
電磁式海流儀探頭多採圓球造型,注意黑球上凸出之兩點為電極, 共有兩對呈對稱分佈。 |
電磁式探頭也可以採碟形或其它造型(如上圖),英國Valeport公司MIDAS型電磁式海流儀即為碟形探頭。(摘自Valeport公司網頁) |
 |
美國Marsh McBirney公司產製的電磁式海流儀(型號511)為球形探頭(照片摘自Ebay)。 1980年代台電公司在宜蘭蘇澳近海環境調查作業即使用此型儀器。 |
 |
InterOcean
Systems公司產製的S4流速儀也是一種電磁式海流儀,左圖黃色圓球為海流儀主體(也兼作探頭),可直接與錨碇纜串接,球上黑圓(共4個)為電磁式海流儀之感應電極。 S4主要規格如下: |
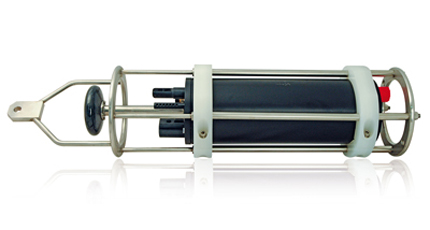
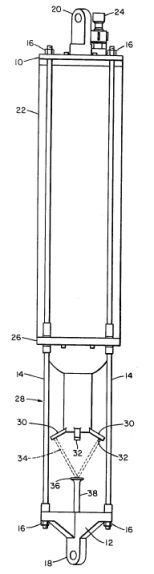
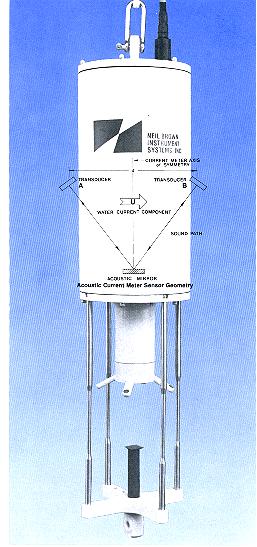
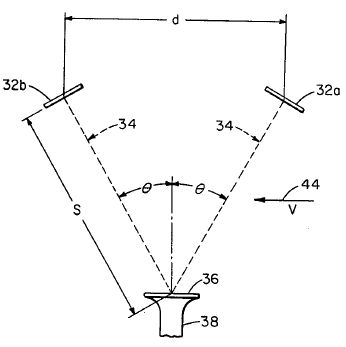
(2)聲學流速計(走時式,travel time),利用聲波在兩點間順流傳播與頂流傳播之時間差來反算流速,氣象觀測使用的超音波式風速計也是根據這種原理,我們以Neil-Brown音波式流速計為例來說明(臺大海洋所於1980年代中後期曾使用過此型流速計)。
|
|
 |
|
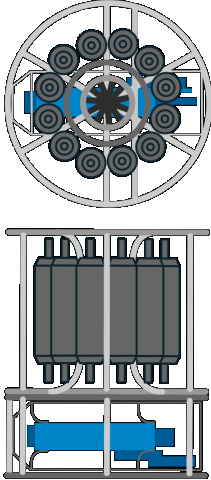
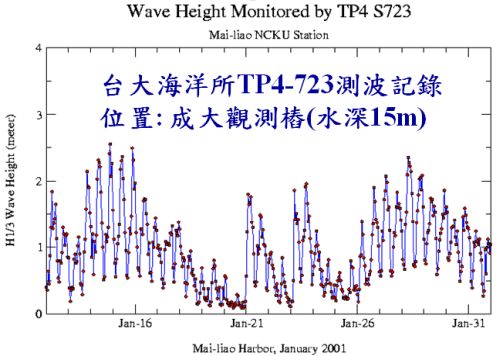
(3)聲學海流儀(都卜勒效應式),廿多年前臺大海研所即引進了聲學都卜勒流剖儀(Acoustic Doppler Current Profiler, ADCP),如今則國內每艘研究船均安裝了船載式ADCP (Shipborne ADCP,SbADCP),而錨碇系統定點海流觀測亦多使用自記式ADCP (Self-contained ADCP,ScADCP)取代了RCM以及其它型式海流儀,因此稱ADCP是當前我國物理海洋學界使用最頻繁的測流裝置亦不為過。下圖為廿年前海研一號執行「南海季風實驗」在呂宋海峽布放錨碇系統時所攝,圖中所示是安裝在玻璃纖維浮球中的「上視式長距型ADCP海流儀」(注意圖中四個呈對稱排列的音鼓便是ADCP最上端部份),關於各種ADCP特性將留待下一節再說明。

(三)、波浪觀測儀器
一般而言,只要是能夠具備:(1)可量測出水位高程變化、(2)反應夠快速(需與波浪週期相比,反應時間至少需小於所擬測波浪週期的1/10,針對一般海面波浪,反應時間小於0.5秒通常便可接受)、且(3)取樣面積不大(即感測器量測範圍之直徑與所擬測波浪之波長相比,比值至少需小於1/10,針對一般海面波浪,感測器量測範圍之直徑至少應小於1m)等三項性能的裝備或儀器均可用於觀測波浪。我們常見的測波儀器如按所用感測器之型式來區分,則可分為壓力式、加速度式、電阻式、電感式、超音波式、微波式、....等類型。
(1)壓力式:一般在近岸淺水海域測波使用壓力式測波儀常用的感測器多選用應變計式,然而當水深與波長之比值大於1/2時,海面波浪所產生的水下壓力變化會隨深度增大而呈指數型態快速衰減,是以如果要將測波儀放置在較深海底(例如大於30m)或是對壓力量測值之精確度要求較高,那麼就該選用壓電晶體式感測器。此外,壓力式測波儀也可兼作潮位量測之用,因此常通稱為潮波儀。1970與1980年代臺大海洋所在近海波浪觀測作業均係使用英國NBA control Ltd.所產製之DNW-5型潮波儀,這型儀器便是使用應變計式感測器,資料解析度為1 mb (相當於1 cm水柱高),最大數值範圍為4096 (12 bits),採8 bits卡式磁帶自記(但為節省磁帶儲存空間,每筆資料只記錄12 bits中最後的8 bits,只有在每次觀測資料組檔頭-header才有一筆完整的12 bits壓力值),由於年代久遠如今已找不到該型儀器之圖片(連古狗搜索大神也找不著);1990年代,臺大海洋所電儀室成功自製了第一代的溫壓計產品,此後便改用自製裝備。
 |
|
 |
隨著電子科技的快速發展,當代的壓力式潮波儀也越做越小,資料內存量則越來越大。左圖為美國SeaBird公司產製之SBE
26plus Seagauge Wave & Tide Recorder SBE 26plus有應變計型與壓電晶體型兩種選用型式,其中壓電晶體型之精確度為 ± 0.01% of full scale (3 mm for 45 psia),而應變計型之精確度則為 ± 0.1% of full scale (30 mm for 45 psia)。 |
 |
將快速反應流速計與壓力計結合後除了可以測波高外還可以同步量測波向(海面深水波浪作用下,海面下水粒子軌跡為向著波傳方向呈圓形迴轉運動,因此可由水粒子流動情形反推波向)。是以前述InterOcean Systems公司產製的S4電磁式海流儀即可當作測波儀使用(可測波向)。左圖為Falmouth Scientific, Inc. 所產製之ACM-WAVE-PLUS波流儀(摘自 http://www.falmouth.com/sensors/tidewavemeters.html ),則為另一例,這是結合走時式聲學流速計(儀器上方黑色橫桿外端即為聲學探頭)以及壓力計的產品(可同步測波高、波向以及海流)。 |
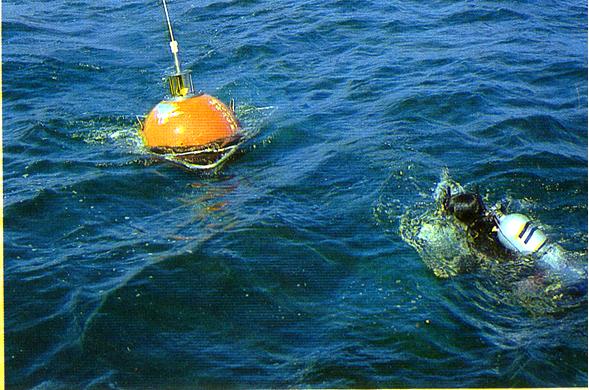
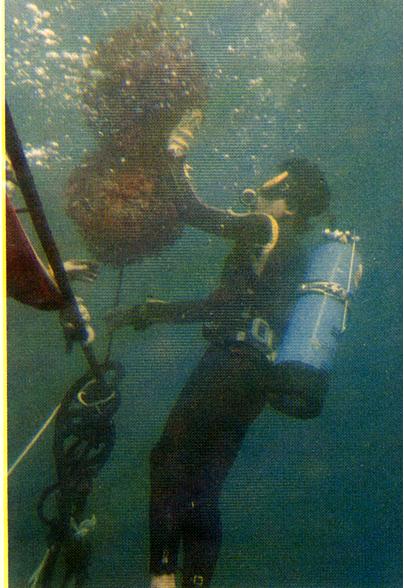
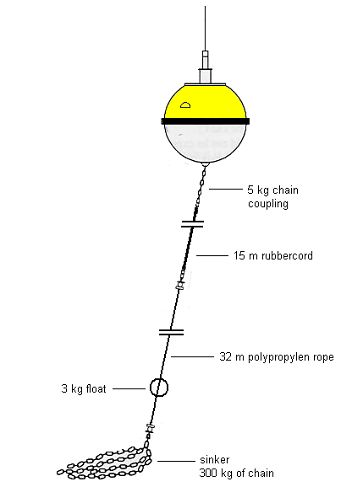
(2)加速度式:1980年代臺大海洋所在較深海域(水深大於90m)觀測波浪係使用荷蘭Datawell BV公司所產製之WaveRider浮球式波浪儀。這一型儀器是利用裝置在浮球重心處之加速度計量測浮球在海面受波浪作用產生之垂直加速度,以電路將垂直加速度訊號對時間積分兩次後便得出海面之垂直位移,然後再將垂直位移訊號藉助發射HF頻帶(在27 MHz附近)的AM無線電信號傳送給岸邊的接收站;這些無線電信號在傳送前先經頻率調變(Frequency Modulation),也就是先將垂直位移之電壓訊號經由電壓/頻率轉換器(V to F converter)變成FM訊號(中頻為259Hz),再附在AM載波上發射出去;岸邊的接收裝置收到經FM調變後的AM無線電信號後則透過頻率/電壓轉換器(F to V converter)將觀測到垂直位移訊號重新還原,然後再經A/D轉換變成數字輸出。下圖所示為Datawell BV公司早期之產品,新一代產品外型變化不大,但加裝了GPS、數位羅盤以及流速計,因此可以同步量測波向,另外還可選用加裝諸如太陽光電板、GSM數位通訊(利用岸邊現有的手機信號台通訊,可以不必在岸邊設接收站)、銥衛星或是ARGOS衛星通訊(便於將浮球式波浪儀放置在遠洋觀測波浪)等方式傳送資料,另外現代的浮球式波浪儀也有將GPS接收器替換加速度計的新設計,可以直接應用GPS的定位功能以量測海面高程變化的方式測波。許多海上浮台或是浮標也都是使用加速度計來量測波高、再加裝流速計或傾斜計以同步測波向。
|
|
WaveRider浮球式波浪儀組成架構示意圖
|

 |
|
{kind=link}
(3)其它:電阻式、電容式、超音波式、微波式...
海水可導電,因此如將長電阻棒或是外層有絕緣的長導線(當作電容器)垂直置放在水面附近,以海水為陰極,而電阻棒或長導線之空氣端則接正極,如此一來電阻或電容便會隨海面上下起伏運動而變動,然後藉由電路量測電阻或電容的變化便可反應出波浪高程變化,這樣的裝置便是電阻式或電容式測波儀。不過,如果海面會有油污則容易影響到電阻棒或電容導線的特性,而造成觀測誤差;另方面這種量測方式需要在海上有可以固定的地方,此外則是大浪時電阻棒或電容導線容易受損,是以電阻式或電容式測波儀在海上現場環境下使用不易故未見廣用;此類測波儀多用於水槽實驗。
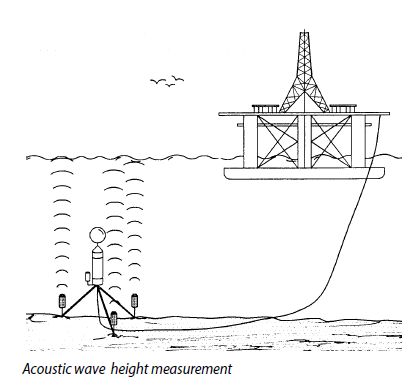
至於超音波式係指聲納測高計(Sonar Altimeter),其原理就和一般聲學測深儀一樣,都是利用回音的走時來量測距離。如果在海面下將窄波束的聲納測高計(如下圖,海研一號CTD架上即加裝了聲納測高計作為防止CTD觸底示警用)以頭朝上方式量測與水面距離當然也可用來測波。如果在海面上有地方(例如石油生產平台)可以固定儀器,那麼也可以在空氣中使用聲納測高計以頭向下的方式來測波。
 |
Teledyne Benthos, Inc., Model PSA-916 Sonar
Altimeter |
 |
臺大海洋所過去曾在鑽油平台上試用過左圖這型測高計於測波作業 DATASONICS PSA-900 PROGRAMMABLE SONAR Operating Frequency: 200 kHz (nominal) Beam Width: 8° conical typical Pulse Length: 350 ms standard Repetition Rates: 10 pps, 1pps, .1pps, or external user selectable Range*: .75-30 meters with 1 cm resolution or .75-100 meters with 10 cm resolution (user selectable) Range Output: 0-5, 0-10 volts DC or 1-11 kHz 50% duty cycle square wave proportional to full scale range selected Depth Pressure Output: 0-5 volts DC or 1-11 kHz represents zero to full scale RS-232 Output: 2400 Baud ASCII output of temperature, depth, range and error signal in engineering units. Operating Depth: 2000 meters (standard) or 6000 meters (optional) (摘自Benthos data sheet) |
 |
 |
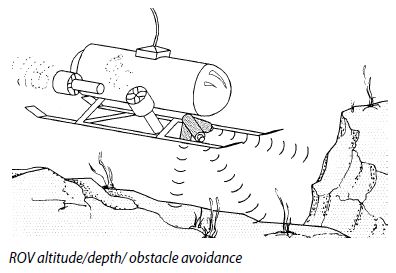 |
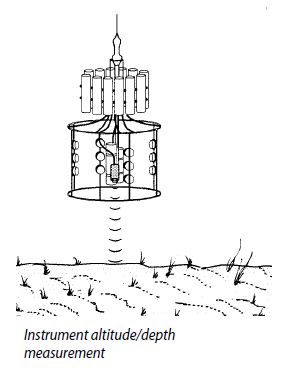
聲納測高計用途示意圖,(上左)隨CTD下放作為CTD觸底示警器(bottom
detector)用;(上右)放置海底以上視方式測波(與潮位),(下左)裝在ROV上作為儀器姿態修正、避碰以及距底高度測知用。 |
 |
 |
至於微波式指的是類似都卜勒雷達測速器的微波式測波裝備(例如日本TSK公司產製的Microwave type wave height meter WM-2),可將其裝在海上固定物(如海上採油平台)上以下視方式量測海面上下起伏之垂直速度,經積分後便可得出水面高程變化。1980年代後期臺大海洋所曾在新竹外海中國石油公司國光平台(上圖右)試裝過此型儀器(上圖左為微波都卜勒雷達天線),但因安裝點距海面高度過高量測效果並不理想。此外也可以使用雷射測距儀以下視方式量測海面起伏變化。總之,如前所述,只要性能上能夠滿足(1)可反應水位高程變化、(2)反應夠快速、(3)取樣面積不大等要求的所有裝備或儀器均可用於波浪觀測。另外近代分析衛星測高儀所發雷達脈衝波打到海面後回波之強度以及波形也可以推估出海面波高與週期統計(如下圖,摘自EUMETSAT網頁),再者運用衛星合成孔徑雷達所測之高解析海面圖像也可以計算得出海面波浪場之二維波數能譜(wave number spectrum),這些近乎實時的衛星觀測資料業已納入全球氣象單位日常波浪預報作業中。
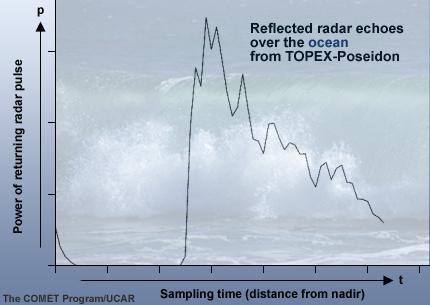 |
海面對衛星測高儀所發雷達脈衝波之回波訊號包含了許多有關海面特性之訊息,分析回波的強度以及波形可以推估海面波高與週期之統計(摘自EUMETSAT網頁)。 |
平衡井、浮球式、壓力式、超音波式、衛星高度計....。
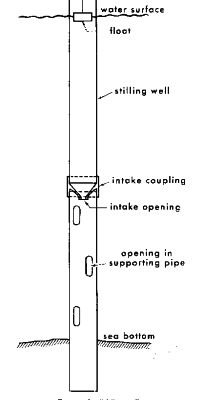
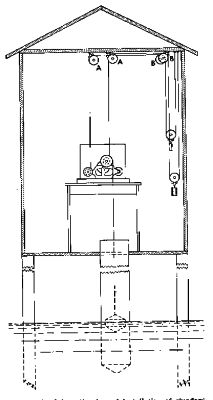
海面波浪幾乎無時、無處不在,波浪起伏會對量測潮汐水位變化(簡稱驗潮)造成干擾,早期自動觀測儀器記錄方式均為類比式輸出(例如以記錄筆將變化曲線繪在記錄紙上,再由人工判讀),為了減少波浪造成的干擾,因此採用平衡井(still well)來濾除高頻率波浪的作用,其作法如下圖左所示,就是在海床上豎立一根中空的封閉長管,此長管只在深部有小孔洞可與外界相通,由於海面波浪所引發之水流與波壓均會向下衰減,故與管外相比平衡井內的水面就能保持相對平靜,但對長週期的潮汐水位變化,管內管外卻不會有差別。早期驗潮儀器多採浮球式,即在平衡井水面上置有一個金屬浮球,此浮球會隨水位起伏而上下,浮球上方則以電阻帶(下下圖左)相連,後者經固定滑車又接往一繫重(如下下圖右),如此可使浮球上方之電阻帶能保持鉛直,浮球上下起伏會改變量測點與水面浮球間電阻帶長度,因此藉由電錶去量測「量測點」與「水體」間之電阻值即可換算成相應之潮位值。
 |
 |
![]() 潮汐測站平衡井(Still Well,左)以及儀器架設安裝(右)示意圖。
潮汐測站平衡井(Still Well,左)以及儀器架設安裝(右)示意圖。
摘自USGS (U.S. Coast and Geodetic Survey) (1965) "Manual of Tide
Observations"。
 |
 |
![]() 浮球式電阻帶潮位儀本體(左圖)以及測量原理(右圖)。
浮球式電阻帶潮位儀本體(左圖)以及測量原理(右圖)。
摘自USGS(U.S. Coast and Geodetic Survey)(1965) "Manual of Tide Observations"。

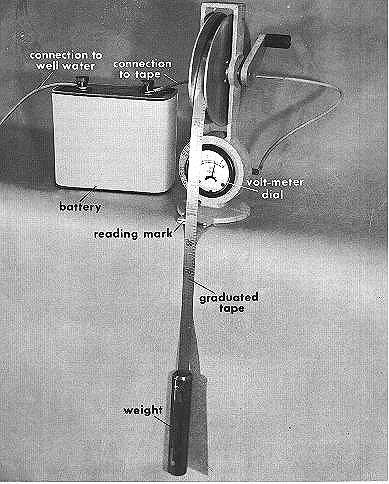
![]() Aanderaa WLR5自記式水位計(使用壓電晶體式感測器)。照片中央之圓盤形物體係機械式編碼器,
下方之藍色物體則為電池。
Aanderaa WLR5自記式水位計(使用壓電晶體式感測器)。照片中央之圓盤形物體係機械式編碼器,
下方之藍色物體則為電池。
和前小節描述測波儀器一樣,「不管白貓黑貓,只要能抓老鼠的就是好貓」,因此任何只要能精準量測出水面高程的儀器都可以用來驗潮。如果已建有平衡井,那麼不論是在井底安裝壓力感應器或是在井上安裝下視式超音波高度計都是可行的方式,但這兩種方式所測資料在本質上仍然有一個必需要了解的大差異;這個差異是由大氣壓變動所造成的,也就是說當氣壓比常年平均的氣壓低時,這時海平面就會比常年平均的海平面高度為高(例如颱風來時,海平面抬升高度中有一部份就是由此效應造成),反之則為低;這種效應物理海洋學稱為「反氣壓計效應」(inverted barometer effect)。因此在平衡井上以超音波高度計所量到的水位是包含了反氣壓計效應的水位,然而由井下以壓力式感應器所量到的則是水柱重量所造成的壓力與水面氣壓之和,換算水柱高時通常都是扣除一個固定的水面氣壓值,因此所得出的水位便相當於是已扣除了反氣壓計效應的水位。(有的時候缺點也可變成優點,就像用壓力式儀器驗潮,如果要得出「真實」的水位,那就得逐筆逐筆去扣除同步的氣壓值,這多麻煩啊!可是我們分析海洋運動現象時,反氣壓計效應往往是先要去除掉的東東,這下子壓力式儀器的缺點不就反倒成優點了嗎?)
近代自記觀測儀器不論內存量或是取樣率都很大(可透過長時間平均過程來濾除波浪效應),另外還可藉由一些新的設計來幫助減少波浪影響(例如將外界壓力透過內徑很小的細長連通管接往壓力感測器,透過流體在細管中的摩擦效應消除波浪週期的快速變化),因此驗潮是否仍一定需要建好平衡井便是見仁見智的問題,不過官方(如中央氣象局)的標準驗潮站都是有平衡井的,學界為研究所設的臨時站則無,另外如果在深水海底放置高精度的壓電晶體式壓力感測器(如上圖Aanderaa WLR5自記式水位計),只要水深深度大於海面波浪一半波長長度,則根本就無需考慮海面波浪的作用。自從十餘年前人造衛星附載之雷達高度計正式運作以來,衛星高度計對海面高程量測的精確度已進步到公分級,因此可以精準量測全球各大洋上的潮汐特性(參閱Ocean Surface Topography,AVISO+)。
 |
 |
本章始建於1998/9/17, revised: 2017/3/26